
Dans cet article, je vous propose d’examiner une notion qui se situe au carrefour de la géométrie euclidienne, de l’algèbre linéaire et de la topologie des espaces normés.
Le point de départ choisi est un résultat important du cours d’algèbre :
Théorème (du supplémentaire orthogonal)
Soit  est un espace vectoriel réel, muni d’un produit scalaire.
est un espace vectoriel réel, muni d’un produit scalaire.
Pour tout sous-espace  de dimension finie :
de dimension finie :
![\[\boxed{E=F\oplus F^{\bot}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e26c913d43a47409d74de7979e446692_l3.png "Rendered by QuickLaTeX.com")
Après quelques rappels préalables, nous donnerons une preuve de ce résultat, puis nous tâcherons d’en explorer un peu les contours.
1 – Produit scalaire et orthogonalité : rapide survol
Dans tout ce qui suit, désigne un  espace vectoriel muni d’un produit scalaire : c’est ce qu’on appelle parfois un espace préhilbertien réel. Si de plus est de dimension finie, on parle plutôt d’espace vectoriel euclidien.
espace vectoriel muni d’un produit scalaire : c’est ce qu’on appelle parfois un espace préhilbertien réel. Si de plus est de dimension finie, on parle plutôt d’espace vectoriel euclidien.
Si  sont deux vecteurs de
sont deux vecteurs de  leur produit scalaire est noté
leur produit scalaire est noté  Rappelons qu’un produit scalaire est une » forme bilinéaire symétrique définie positive « , ce qui signifie que :
Rappelons qu’un produit scalaire est une » forme bilinéaire symétrique définie positive « , ce qui signifie que :
- [ linéarité à gauche ] pour tous
 et
et  :
:![\[\left(\lambda x+x'\mid y\right)=\lambda\left(x\mid y\right)+\left(x'\mid y\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bcbec80830cfc7fbac684e5b1641679b_l3.png "Rendered by QuickLaTeX.com")
- [ symétrie ] pour tout
 :
:![\[\left(x\mid y\right)=\left(y\mid x\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d8c343bc86fc9d59d743f0bdbd6d3ddb_l3.png "Rendered by QuickLaTeX.com")
- [ définie positivité ] pour tout
 :
:
avec égalité seulement si![\[\left(x\mid x\right)\geqslant0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-220e09994c9a8c47b78d99f990502d42_l3.png "Rendered by QuickLaTeX.com")

➡ Linéarité à gauche et symétrie se combinent pour donner la linéarité à droite, d’où la bilinéarité.
L’application :
![\[E\rightarrow\mathbb{R}^{+},\thinspace x\mapsto\sqrt{\left(x\mid x\right)}\underset{\text{def}}{=}\left\Vert x\right\Vert \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-794e9f9b909b4794e5f206b6d3cf8f2c_l3.png "Rendered by QuickLaTeX.com")
(appelée norme euclidienne).
Lorsque  les vecteurs
les vecteurs  et
et  sont dits orthogonaux. Une famille orthogonale est, par définition, composée de vecteurs deux à deux orthogonaux.
sont dits orthogonaux. Une famille orthogonale est, par définition, composée de vecteurs deux à deux orthogonaux.
Quelques résultats fondamentaux :
- Toute famille orthogonale composée de vecteurs non nuls est libre.
- Toute famille orthogonale
 vérifie la formule de Pythagore :
vérifie la formule de Pythagore :![\[\Vert x_{1}+\cdots+x_{r}\Vert^{2}=\left\Vert x_{1}\right\Vert ^{2}+\cdots+\left\Vert x_{r}\right\Vert ^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5464d855a5a4e2229d5a579eee08ec72_l3.png "Rendered by QuickLaTeX.com")
- Si est de dimension finie, alors possède des bases orthonormales, c’est-à-dire des bases composées de vecteurs unitaires (ie : de norme 1) et deux à deux orthogonaux. En outre, si
 est une telle base alors pour tout :
est une telle base alors pour tout :
d’où (d’après la formule de Pythagore) :![\[x=\sum_{i=1}^{n}\left(x\mid e_{i}\right)e_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2da70d7911f7a94ce14f7a564e1daeee_l3.png "Rendered by QuickLaTeX.com")
![\[\left\Vert x\right\Vert ^{2}=\sum_{i=1}^{n}\left(x\mid e_{i}\right)^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-dc424823b088bc38f8ab4c00b38381f0_l3.png "Rendered by QuickLaTeX.com")
Si  est une partie quelconque de l’orthogonal de désigne l’ensemble des vecteurs de qui sont orthogonaux à tout vecteur de
est une partie quelconque de l’orthogonal de désigne l’ensemble des vecteurs de qui sont orthogonaux à tout vecteur de  Il s’agit d’un sous-espace vectoriel de qu’on note
Il s’agit d’un sous-espace vectoriel de qu’on note 
On vérifie que :

- si
 vérifient
vérifient  alors
alors 
- pour tout
 :
: 
Remarque
Le premier de ces trois points se justifie par le fait que si un vecteur est orthogonal à tout vecteur de , alors il est en particulier orthogonal à lui-même, donc nul.
Cette petite chose est très couramment utilisée pour prouver une égalité entre vecteurs d’espace préhilbertien. L’exercice qui suit en donne une illustration.
Exercice
On considère un espace euclidien ainsi qu’une famille  de vecteurs de
de vecteurs de 
Montrer que si  est génératrice de alors l’endomorphisme
est génératrice de alors l’endomorphisme
![\[f:E\rightarrow E,\thinspace x\mapsto\sum_{i=1}^{q}\left(x\mid v_{i}\right)v_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f4c4c780e1483df9f55c326b5eb7ffe9_l3.png "Rendered by QuickLaTeX.com")
Solution proposée (cliquer pour déplier / replier)
Observons que si  alors :
alors :

 pour tout
pour tout  Mais comme est génératrice de ceci entraîne que
Mais comme est génératrice de ceci entraîne que  pour tout
pour tout  Ainsi
Ainsi  et donc
et donc  L’injectivité de
L’injectivité de  est établie et sa bijectivité en découle (via le théorème du rang, puisque est de dimension finie).
est établie et sa bijectivité en découle (via le théorème du rang, puisque est de dimension finie).
2 – Le théorème du supplémentaire orthogonal
On prouve ici le théorème énoncé dans le préambule de l’article.
Si vous préférez suivre la démonstration détaillée en vidéo, je vous renvoie au troisième épisode d’une séquence consacrée à l’étude des projecteurs :
Les hypothèses indiquent que est de dimension finie (condition réalisée, en particulier, si est lui-même de dimension finie). On peut donc considérer une base de et, tant qu’à faire, une base orthonormale  de
de  Bien entendu,
Bien entendu,  désigne la dimension de
désigne la dimension de
On veut prouver que  c’est-à-dire que tout vecteur de peut s’écrire, de manière unique, comme la somme d’un vecteur de et d’un vecteur de
c’est-à-dire que tout vecteur de peut s’écrire, de manière unique, comme la somme d’un vecteur de et d’un vecteur de 
On raisonne par Analyse / Synthèse.
Partie « Analyse »
Soit  Supposons que
Supposons que  avec
avec  et
et 
On peut exprimer  dans la base
dans la base  :
:
![\[a=\sum_{i=1}^{r}\lambda_{i}e_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f549244953f89d6300ee01c09ec818c7_l3.png "Rendered by QuickLaTeX.com")
 pour tout
pour tout  :
: ![\begin{equation*}\begin{split}\left(x\mid e_{j}\right) & = \left(a\mid e_{j}\right)+\left(b\mid e_{j}\right)\\& = \left[\sum_{i=1}^{r}\lambda_{i}\left(e_{i}\mid e_{j}\right)\right]+\left(b\mid e_{j}\right)\end{split}\end{equation*}](https://math-os.com/wp-content/ql-cache/quicklatex.com-b7fafb222f887a22a0ae8e857850586e_l3.png "Rendered by QuickLaTeX.com")
Mais la famille  est orthonormale et
est orthonormale et  donc :
donc :
![\[\left(x\mid e_{j}\right)=\lambda_{j}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5e0d309e4dee22154d29998c094037e7_l3.png "Rendered by QuickLaTeX.com")
On a montré que si un couple  convient, alors il s’agit nécessairement de :
convient, alors il s’agit nécessairement de :
![\[\left\{\begin{array}{ccc}a & = & {\displaystyle \sum_{i=1}^{r}\left(x\mid e_{i}\right)e_{i}}\\\\b & = & x-{\displaystyle \sum_{i=1}^{r}\left(x\mid e_{i}\right)e_{i}}\end{array}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-042c8a674f744eb115940cdf8cbcde85_l3.png "Rendered by QuickLaTeX.com")
Partie « Synthèse »
Réciproquement, si l’on définit et  par ces formules, alors d’évidence et
par ces formules, alors d’évidence et  Il reste juste à vérifier que
Il reste juste à vérifier que
Vu que la famille engendre  il suffit de prouver que
il suffit de prouver que  pour tout
pour tout 
Or, c’est bien le cas :

Ceci termine la preuve.
3 – Projecteurs orthogonaux
D’une manière générale, lorsqu’un espace vectoriel se décompose en la somme directe de deux sous-espaces supplémentaires, disons  on dispose du projecteur sur parallèlement à
on dispose du projecteur sur parallèlement à  qu’on peut noter
qu’on peut noter 
Pour tout  on sait qu’il existe un unique couple
on sait qu’il existe un unique couple  tel que
tel que  Par définition
Par définition  est l’application de dans lui-même qui à associe
est l’application de dans lui-même qui à associe 
On vérifie aisément que :
- est linéaire (c’est un endomorphisme de




Tous ces résultats sont entièrement détaillés dans la vidéo ci-dessous, à laquelle on pourra se reporter si nécessaire :
Dans le cas particulier d’un espace préhilbertien réel et d’un sous-espace de dimension finie, on a vu plus haut que  On peut donc considérer le projecteur sur parallèlement à
On peut donc considérer le projecteur sur parallèlement à  , c’est-à-dire l’endomorphisme
, c’est-à-dire l’endomorphisme 
C’est ce qu’on appelle le projecteur orthogonal sur qu’on note plutôt 
Si est une base orthonormale de alors :
![\[ \forall x\in E,\thinspace p_{F}\left(x\right)=\sum_{i=1}^{r}\left(x\mid e_{i}\right)e_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e8b6458c5ac9f196c54414bd1f322557_l3.png "Rendered by QuickLaTeX.com")
On en déduit, d’après la formule de Pythagore :
![\[\left\Vert p_{F}\left(x\right)\right\Vert ^{2}=\sum_{i=1}^{r}\left(x\mid e_{i}\right)^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-22bec7850ce1e96f0410aab039bd1f70_l3.png "Rendered by QuickLaTeX.com")
 et
et  sont orthogonaux (le premier appartient à tandis que le second appartient à
sont orthogonaux (le premier appartient à tandis que le second appartient à  , et donc, toujours avec la formule de Pythagore :
, et donc, toujours avec la formule de Pythagore : ![\[\left\Vert x\right\Vert ^{2}=\left\Vert p_{F}\left(x\right)\right\Vert ^{2}+\left\Vert x-p_{F}\left(x\right)\right\Vert ^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-49ea06c8caeac661d69debb8017c24c1_l3.png "Rendered by QuickLaTeX.com")
Plus généralement, pour tout vecteur  on peut écrire :
on peut écrire :
![\[x-y=\left(p_{F}\left(x\right)-y\right)+\left(x-p_{F}\left(x\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f492589d98664337411391e86c93f2d1_l3.png "Rendered by QuickLaTeX.com")
 et
et  :
: ![\[\left\Vert x-y\right\Vert ^{2}=\left\Vert p_{F}\left(x\right)-y\right\Vert ^{2}+\left\Vert x-p_{F}\left(x\right)\right\Vert ^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-028eab88c56a1ffd33889a406da7f358_l3.png "Rendered by QuickLaTeX.com")
En particulier :
![\[\boxed{\left\Vert x-y\right\Vert ^{2}\geqslant\left\Vert x-p_{F}\left(x\right)\right\Vert ^{2}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6ce1ce492bff8e390b65c42b0f1aa37b_l3.png "Rendered by QuickLaTeX.com")
 c’est-à-dire si
c’est-à-dire si 
Autrement dit :
Théorème (projection orthogonale sur un SEV de dimension finie)
Etant donnés :
- un espace préhilbertien
- un sous-espace vectoriel de dimension finie,
- et un vecteur
la distance de à un vecteur  (qui est mesurée par
(qui est mesurée par  est minimale lorsque est le projeté orthogonal de sur En symboles :
est minimale lorsque est le projeté orthogonal de sur En symboles :
![\[ \inf_{y\in F}\left\Vert x-y\right\Vert =\left\Vert x-p_{F}\left(x\right)\right\Vert \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5f66d9338a74a995ec89598a9e5479e8_l3.png "Rendered by QuickLaTeX.com")
En outre, si est une base orthonormale de alors :
![\[\inf_{y\in F}\left\Vert x-y\right\Vert =\sqrt{\left\Vert x\right\Vert ^{2}-\left\Vert p_{F}\left(x\right)\right\Vert ^{2}}=\sqrt{\left\Vert x\right\Vert ^{2}-\sum_{i=1}^{r}\left(x\mid e_{i}\right)^{2}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6652eb419373be773cb57e02cbe61113_l3.png "Rendered by QuickLaTeX.com")
Ce résultat est fondamental, car il permet de traiter certains problèmes de recherche de minimum.
Par exemple, le calcul de :
![\[\fcolorbox{black}{myBlue}{$\inf_{\left(a,b,c\right)\in\mathbb{R}^{3}}\int_{0}^{+\infty}\left(t^{3}-at^{2}-bt-c\right)^{2}\thinspace e^{-t}\thinspace dt$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7e42639a38ac4c6a1195350d065f5040_l3.png "Rendered by QuickLaTeX.com")
![E=\mathbb{R}_{3}\left[X\right],](https://math-os.com/wp-content/ql-cache/quicklatex.com-f7b238d9454dc74a90dec8787afceaa7_l3.png "Rendered by QuickLaTeX.com") l’espace des polynômes de degré inférieur ou égal à 3,
l’espace des polynômes de degré inférieur ou égal à 3,- le produit scalaire défini sur par :
![\[\forall\left(P,Q\right)\in E^{2},\thinspace\left(P\mid Q\right)=\int_{0}^{+\infty}P\left(t\right)Q\left(t\right)e^{-t}\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-681e2f9a16ccf33ecc0a7c33e40796cf_l3.png "Rendered by QuickLaTeX.com")
- le sous-espace
![F=\mathbb{R}_{2}\left[X\right],](https://math-os.com/wp-content/ql-cache/quicklatex.com-3309dca14da019a8222166ac70022835_l3.png "Rendered by QuickLaTeX.com")
- le polynôme

Ce calcul est traité en détail dans la fiche d’exercices n° 1 sur les produits scalaires (exercice n° 8).
4 – Orthogonal d’un hyperplan
Lorsque n’est plus supposé de dimension finie, la somme  est encore directe, car si un vecteur appartient à
est encore directe, car si un vecteur appartient à  il est orthogonal à lui-même donc nul. Cependant, l’égalité
il est orthogonal à lui-même donc nul. Cependant, l’égalité  n’est plus vraie en général.
n’est plus vraie en général.

Nous allons examiner cette situation dans le cas particulier où est un hyperplan de (c’est-à-dire un sous-espace possédant une droite supplémentaire).
Si est de dimension finie, alors d’après le théorème du supplémentaire orthogonal démontré à la section 2 :
![\[\dim\left(F^{\bot}\right)=\dim\left(E\right)-\dim\left(F\right)=1\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5821f64f798a44321a7004cb567ade1a_l3.png "Rendered by QuickLaTeX.com")
est une droite vectorielle.
Que se passe-t-il si est de dimension infinie ? La proposition suivante répond à cette question :
Proposition 1
Pour tout hyperplan  d’un espace préhilbertien de deux choses l’une :
d’un espace préhilbertien de deux choses l’une :
- soit
 est une droite vectorielle,
est une droite vectorielle, - soit

En effet, supposons que  et soit
et soit  Fatalement,
Fatalement,  sans quoi serait orthogonal à lui-même donc nul.
sans quoi serait orthogonal à lui-même donc nul.
Il en résulte que : 
Avant de poursuivre, détaillons ce point …
On sait qu’il existe  tel que
tel que  En particulier, il existe
En particulier, il existe  et
et  tels que
tels que  Nécessairement,
Nécessairement,  car sinon
car sinon  : contradiction ! On a donc :
: contradiction ! On a donc :
![\[ b=\frac{1}{\alpha}\left(a-v\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-da5b7f35a28f50f100b3a10fc6779351_l3.png "Rendered by QuickLaTeX.com")
sous la forme  avec
avec  et
et  on peut aussi écrire :
on peut aussi écrire : ![\[ x=\left(w-\frac{1}{\gamma}v\right)+\frac{1}{\gamma}a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1dcbc97b95f775f8282890e6deb6a0e8_l3.png "Rendered by QuickLaTeX.com")
 Finalement, on a bien :
Finalement, on a bien : 
Terminons maintenant la preuve.
Comme  il est clair que
il est clair que 
Inversement, si  alors en décomposant sous la forme
alors en décomposant sous la forme  avec
avec  et
et  on observe (en raison de la stabilité de par combinaison linéaire) que :
on observe (en raison de la stabilité de par combinaison linéaire) que :
![\[ h=x-\lambda a\in H^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-730e8201c058b8a58aaf42e4cf6215bb_l3.png "Rendered by QuickLaTeX.com")
 c’est-à-dire
c’est-à-dire  Ainsi
Ainsi 
Finalement, si n’est pas réduit à  c’est une droite vectorielle.
c’est une droite vectorielle.
La proposition 1 est démontrée.
Voyons maintenant deux exemples explicites, illustrant chacun l’une des deux possibilités.
On choisit pour l’espace vectoriel des applications continues de ![\left[0,1\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-beb10f64e7f6b1b271629e3a8291d2e5_l3.png "Rendered by QuickLaTeX.com") dans
dans  que l’on munit du produit scalaire défini par :
que l’on munit du produit scalaire défini par :
![\[ \forall\left(f,g\right)\in E^{2},\:\left(f\mid g\right)=\int_{0}^{1}f\left(t\right)g\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-28d4c36fd545161037210332b7db5d14_l3.png "Rendered by QuickLaTeX.com")
Exemple 1 : un hyperplan dont l’orthogonal est nul
Considérons le sous-ensemble de constitué des applications qui s’annulent en 
est le noyau de la forme linéaire non nulle  C’est donc un hyperplan de
C’est donc un hyperplan de
Déterminons
Si  alors :
alors :
![\[ \forall f\in A,\thinspace\int_{0}^{1}u\left(t\right)f\left(t\right)\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2646e3d75c71826f3e5545ae01512da1_l3.png "Rendered by QuickLaTeX.com")
On peut penser à choisir de la manière suivante : on fixe ![a\in\left]0,1\right[](https://math-os.com/wp-content/ql-cache/quicklatex.com-1245de6b69fc4b91dbd103273ccf4a23_l3.png "Rendered by QuickLaTeX.com") assez proche de 0 et l’on considère l’application continue qui coïncide avec sur
assez proche de 0 et l’on considère l’application continue qui coïncide avec sur ![\left[a,1\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e0eda7f7908947bc223378f9a5563ac1_l3.png "Rendered by QuickLaTeX.com") et dont la restriction à
et dont la restriction à ![\left[0,a\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bcd1babce1d5d45f618e5a25525100f7_l3.png "Rendered by QuickLaTeX.com") est linéaire. On ferait ensuite tendre vers
est linéaire. On ferait ensuite tendre vers  pour obtenir
pour obtenir  et conclure ainsi que
et conclure ainsi que 
Voyons une méthode moins géométrique… mais plus rapide (et qui sera généralisée à l’exercice n° 9 de cette fiche) !
Considérons l’application
![\[f\,:\,\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto t\thinspace u\left(t\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b521d21edfc0f353e9fcfe7048851a47_l3.png "Rendered by QuickLaTeX.com")
 et donc
et donc  c’est-à-dire :
c’est-à-dire : ![\[ \int_{0}^{1}t\thinspace u\left(t\right)^{2}\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c1b0c9b44b3087392c09305960d71edf_l3.png "Rendered by QuickLaTeX.com")
L’application ![\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto t\thinspace u\left(t\right)^{2}](https://math-os.com/wp-content/ql-cache/quicklatex.com-9835e96a89650a804b40f95760696c20_l3.png "Rendered by QuickLaTeX.com") est continue, positive et d’intégrale nulle, donc identiquement nulle (si nécessaire, consulter le corrigé de l’exercice n° 6 de cette fiche).
est continue, positive et d’intégrale nulle, donc identiquement nulle (si nécessaire, consulter le corrigé de l’exercice n° 6 de cette fiche).
Ceci prouve que :

![\left]0\right.](https://math-os.com/wp-content/ql-cache/quicklatex.com-d05212564274cf5388334f1a66aead1a_l3.png "Rendered by QuickLaTeX.com")
![\left.,1\right],\thinspace u\left(t\right)=0](https://math-os.com/wp-content/ql-cache/quicklatex.com-c203d0d29bb96a5758f239caea72a602_l3.png "Rendered by QuickLaTeX.com")
Mais comme  est continue en
est continue en  on a aussi :
on a aussi :  Finalement,
Finalement,  et l’on a prouvé que :
et l’on a prouvé que :
![\[ \boxed{A^{\bot}=\left\{0\right\}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a3be810fc9d9cba088751a82bb51c7fd_l3.png "Rendered by QuickLaTeX.com")
Exemple 2 : un hyperplan dont l’orthogonal est une droite
Considérons le sous-ensemble  de constitué des applications dont l’intégrale sur est nulle.
de constitué des applications dont l’intégrale sur est nulle.
est le noyau de la forme linéaire non nulle  C’est donc un hyperplan de
C’est donc un hyperplan de
Déterminons 
Si  alors :
alors :
![\[ \forall f\in B,\thinspace\int_{0}^{1}u\left(t\right)f\left(t\right)\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e47eaa431baac56767a29667e029be38_l3.png "Rendered by QuickLaTeX.com")
Choisissons pour l’élément de obtenu en retranchant à sa valeur moyenne :
![\[ \forall t\in\left[0,1\right],\thinspace f\left(t\right)=u\left(t\right)-\int_{0}^{1}u\left(x\right)\thinspace dx\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-28fd4907ecacacf8b19406b30340276d_l3.png "Rendered by QuickLaTeX.com")
On a donc :
![\[ \int_{0}^{1}u\left(t\right)\left[u\left(t\right)-\int_{0}^{1}u\left(x\right)\thinspace dx\right]\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d672b7e701776251cbe7e2a93156a321_l3.png "Rendered by QuickLaTeX.com")
![\[ \int_{0}^{1}u\left(t\right)^{2}\thinspace dt=\left(\int_{0}^{1}u\left(t\right)\thinspace dt\right)^{2}\qquad\left(\spadesuit\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1370a8c3fc5241ca160b7c546ff5adb4_l3.png "Rendered by QuickLaTeX.com")
Arrêtons-nous un instant, car un rappel s’impose. Il s’agit de la célèbre …
Inégalité de Cauchy-Schwarz
Si est un espace préhilbertien, alors pour tout couple :
![\[ \left|\left(x\mid y\right)\right|\leqslant\left\Vert x\right\Vert \thinspace\left\Vert y\right\Vert \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c22f1a205771e46d7d4c48e7b3ed431e_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\left(x\mid y\right)^{2}\leqslant\left(x\mid x\right)\thinspace\left(y\mid y\right)}\qquad\left(CS\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5494bf153ecdcaa9d7af45e6a54bdcd6_l3.png "Rendered by QuickLaTeX.com")
 est liée.
est liée.
Dans le présent contexte, l’inégalité (CS) prend la forme suivante.
Pour tout couple  d’applications continues de dans
d’applications continues de dans  :
:
![\[ \left(\int_{0}^{1}f\left(t\right)g\left(t\right)\thinspace dt\right)^{2}\leqslant\left(\int_{0}^{1}f\left(t\right)^{2}\thinspace dt\right)\left(\int_{0}^{1}g\left(t\right)^{2}\thinspace dt\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b88265242041ee8e4d47b00d085d006c_l3.png "Rendered by QuickLaTeX.com")
On reconnait donc que  correspond au cas d’égalité dans l’inégalité de Cauchy-Schwarz, pour le couple
correspond au cas d’égalité dans l’inégalité de Cauchy-Schwarz, pour le couple  où
où  désigne l’application constante
désigne l’application constante ![\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto1.](https://math-os.com/wp-content/ql-cache/quicklatex.com-a97413447410dfb0ce7649a084f05055_l3.png "Rendered by QuickLaTeX.com")
Il est donc nécessaire que la famille soit liée, ce qui (vu que n’est pas l’application nulle) signifie qu’il existe tel que 
Autrement dit, la condition signifie simplement que est constante.
Réciproquement, il est facile de voir que toute application constante de dans appartient à
En définitive,  est le sous-espace de constitué des applications constantes, c’est-à-dire la droite vectorielle engendrée par :
est le sous-espace de constitué des applications constantes, c’est-à-dire la droite vectorielle engendrée par :
![\[ \boxed{B^{\bot}=\mathbb{R}\theta}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0d70f50a29580049317d8191fcbbbc6a_l3.png "Rendered by QuickLaTeX.com")
On peut faire plus simple !
Notons toujours ![B=\{f\in C([0,1],\mathbb{R});\,\int_0^1f=0\}](https://math-os.com/wp-content/ql-cache/quicklatex.com-0908187f451a1ad7a8d3862a5774a0e6_l3.png "Rendered by QuickLaTeX.com") et l’application constante
et l’application constante  .
.
Soit  . Notons
. Notons  . Alors
. Alors  , donc
, donc  et
et  .
.
Par conséquent :  et donc
et donc  .
.
5 – Bi-orthogonal d’un sous-espace
Par définition, étant donné un espace préhilbertien et une partie de  l’ensemble
l’ensemble  sera appelé le bi-orthogonal de (je ne suis pas certain que cette appellation soit tout à fait standard, mais peu importe).
sera appelé le bi-orthogonal de (je ne suis pas certain que cette appellation soit tout à fait standard, mais peu importe).
est le sous-espace vectoriel formé des vecteurs qui sont orthogonaux à tous les éléments de Il est donc évident que :
![\[A\subset\left(A^{\bot}\right)^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-718e67ea334498a278b2e3107a41f2f5_l3.png "Rendered by QuickLaTeX.com")
Dans le cas où est de dimension finie et si est un sous-espace vectoriel, on peut appliquer deux fois le théorème du supplémentaire orthogonal. D’une part :
![\[E=F\oplus F^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b9c679b3ace22f2a562ccedff933bf05_l3.png "Rendered by QuickLaTeX.com")
![\[E=F^{\bot}\oplus\left(F^{\bot}\right)^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8e7ec4de007bf39977b18e9bdc1fcae5_l3.png "Rendered by QuickLaTeX.com")
![\[\dim\left(E\right)=\dim\left(E\right)-\dim\left(F^{\bot}\right)=\dim\left(\left(F^{\bot}\right)^{\bot}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-38b1d846fd1494c4a959fa52740ebf90_l3.png "Rendered by QuickLaTeX.com")
Avec une inclusion et l’égalité des dimensions, on conclut donc que :
Proposition 2
Si est un sous-espace vectoriel d’un espace euclidien, alors :
![\[F=\left(F^{\bot}\right)^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f887fad7dcea20da43208ccd9d9ee11d_l3.png "Rendered by QuickLaTeX.com")
Maintenant, si est de dimension infinie, cette égalité n’est pas vraie en général. Il suffit pour le voir de considérer l’exemple 1 de la section précédente. On a vu en effet que l’hyperplan vérifiait  Par conséquent :
Par conséquent :
![\[A\neq E=\left(A^{\bot}\right)^{\bot}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-793fb82df16ebae7e35a5af40377dbea_l3.png "Rendered by QuickLaTeX.com")
Proposition 3
Si est un espace préhilbertien et si est un sous-espace vectoriel de tel que alors 
Manifestement, la proposition 3 prolonge la 2. Mais pour l’établir, plus moyen de faire intervenir la notion de dimension …
Considérons  et décomposons-le sous la forme avec et
et décomposons-le sous la forme avec et
Alors  car
car  et
et  est stable par différence. Donc
est stable par différence. Donc  et donc
et donc  (vecteur orthogonal à lui-même, one more time …). Ceci prouve l’inclusion
(vecteur orthogonal à lui-même, one more time …). Ceci prouve l’inclusion  et donc l’égalité. La proposition 3 est établie.
et donc l’égalité. La proposition 3 est établie.
Pour finir cette section, nous allons montrer que la réciproque de l’implication établie dans la proposition 3 est fausse. Il s’agit de trouver un exemple de sous-espace d’un espace préhilbertien vérifiant  mais
mais 
Exemple 3 : un sous-espace vérifiant  mais
mais 
Soit l’espace des applications continues de ![\left[-1,1\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6eb9bba14ab16248d38d005779dc34a8_l3.png "Rendered by QuickLaTeX.com") dans muni du produit scalaire défini par :
dans muni du produit scalaire défini par :
![\[\forall\left(f,g\right)\in E^{2},\thinspace\left(f\mid g\right)=\int_{-1}^{1}f\left(t\right)g\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9286ae6dd268bf84af4dee9f38449488_l3.png "Rendered by QuickLaTeX.com")
![\[D=\left\{f\in E;\,\forall t\in\left[0,1\right],\thinspace f\left(t\right)=0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ec4e617c489ae8a22c878ec71a25fcc2_l3.png "Rendered by QuickLaTeX.com")
![\[G=\left\{f\in E;\,\forall t\in\left[-1,0\right],\thinspace f\left(t\right)=0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-237ad89541cf103aade29d2b6c87a879_l3.png "Rendered by QuickLaTeX.com")
Vérifions que  et que
et que  .
.
Il en résultera que :
![\[\boxed{G=\left(G^{\bot}\right)^{\bot}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d91b5f2880a4c2d35ee9e2e751e099cc_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{G\oplus G^{\bot}\neq E}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a4204efd23808a24f653be012d9f4893_l3.png "Rendered by QuickLaTeX.com")
 s’annulent en
s’annulent en
Si  considérons l’application
considérons l’application  définie par :
définie par :
![\[\forall t\in\left[-1,1\right],\thinspace g\left(t\right)=\left\{\begin{array}{cc}0 & \text{si }t\in\left[-1,0\right]\\\\t\thinspace f\left(t\right) & \text{si }t\in\left[0,1\right]\end{array}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c208160e5b8471545a285035e1b5195e_l3.png "Rendered by QuickLaTeX.com")
Visiblement,  et donc
et donc  c’est-à-dire :
c’est-à-dire :
![\[\int_{0}^{1}tf\left(t\right)^{2}\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a372f69ccc53cfe563ee8f86df0cb1ec_l3.png "Rendered by QuickLaTeX.com")
Ceci entraîne que est nulle sur ![\left[0,1\right],](https://math-os.com/wp-content/ql-cache/quicklatex.com-b01ef9f1983c969ecb0687222e635278_l3.png "Rendered by QuickLaTeX.com") autrement dit que
autrement dit que  Ainsi,
Ainsi,  et l’inclusion inverse est claire. Bref :
et l’inclusion inverse est claire. Bref :
![\[G^{\bot}=D\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6ff505f15ba214e75e997bf8c297642c_l3.png "Rendered by QuickLaTeX.com")
![\[D^{\bot}=G\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5337d7e24bee1b8d4530d9cde81b83cb_l3.png "Rendered by QuickLaTeX.com")
6 – Sous-espaces fermés
Les pré-requis pour ce qui suit sont la notion de partie fermée d’un espace vectoriel normé et les trois propriétés suivantes :
- l’intersection de toute famille de fermés de est un fermé de
- si
 est une application continue, alors l’image réciproque par
est une application continue, alors l’image réciproque par  d’un fermé de est un fermé de
d’un fermé de est un fermé de - une forme linéaire est continue si, et seulement s’il existe
 tel que
tel que![\[\forall x\in E,\thinspace\left|\varphi\left(x\right)\right|\leqslant k\thinspace\left\Vert x\right\Vert\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-429db41113013e51975adc448d5cf437_l3.png "Rendered by QuickLaTeX.com")
Soit un espace préhilbertien. Pour tout  notons
notons  la forme linéaire définie par :
la forme linéaire définie par :
![\[ \varphi_{a}\thinspace:\thinspace E\rightarrow\mathbb{R},\thinspace x\mapsto\left(a\mid x\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b9298cd790316b13bc642c093dce8b2c_l3.png "Rendered by QuickLaTeX.com")
![\[\forall x\in E,\thinspace\left|\varphi_{a}\left(x\right)\right|\leqslant\left\Vert a\right\Vert \thinspace\left\Vert x\right\Vert \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-003ded7edd3ca1ccca234448abd7a8df_l3.png "Rendered by QuickLaTeX.com")
 Le noyau de est donc une partie fermée de (c’est plus précisément un hyperplan fermé, si toutefois
Le noyau de est donc une partie fermée de (c’est plus précisément un hyperplan fermé, si toutefois  Bien entendu, le noyau de
Bien entendu, le noyau de  est
est 
Pour toute partie de on constate avec la définition de l’orthogonal que :
![\[A^{\bot}=\bigcap_{a\in A}\ker\left(\varphi_{a}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e71aedea1082bc9764d7abe7f0c78bac_l3.png "Rendered by QuickLaTeX.com")
Ainsi,  se présente comme l’intersection d’une famille de fermés et c’est donc un fermé de
se présente comme l’intersection d’une famille de fermés et c’est donc un fermé de
En particulier, si un sous-espace de vérifie  alors est fermé dans Nous allons maintenant voir, à l’aide d’un contre-exemple, que la réciproque est fausse.
alors est fermé dans Nous allons maintenant voir, à l’aide d’un contre-exemple, que la réciproque est fausse.
Exemple 4 : un sous-espace fermé qui ne coïncide pas avec son bi-orthogonal
On revient à l’espace des applications continues de dans muni du produit scalaire défini par :
![\[\forall\left(f,g\right)\in E^{2},\thinspace\left(f\mid g\right)=\int_{0}^{1}f\left(t\right)g\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-90254f0d40e97c3328e6682efe9406f5_l3.png "Rendered by QuickLaTeX.com")
et l’on pose : ![\[H=\left\{f\in E;\thinspace\int_{0}^{a}f\left(t\right)\thinspace dt=0\right\} \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fd3de70a3ef50126108128f308caf832_l3.png "Rendered by QuickLaTeX.com")
est un hyperplan car c’est le noyau de la forme linéaire non nulle 
En outre  est continue puisque, pour tout
est continue puisque, pour tout  et d’après l’inégalité de Cauchy-Schwarz :
et d’après l’inégalité de Cauchy-Schwarz :
![\[\left|\psi\left(f\right)\right|=\left|\int_{0}^{a}f\left(t\right)\thinspace dt\right|\leqslant\left(\int_{0}^{a}dt\right)^{1/2}\left(\int_{0}^{a}f\left(t\right)^{2}\thinspace dt\right)^{1/2}=\sqrt{a}\left\Vert f\right\Vert _{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-cfeadf019fa3fea8402c2bf36a0609bb_l3.png "Rendered by QuickLaTeX.com")
Par conséquent, est fermé dans Déterminons son orthogonal.
Soit  Pour tout
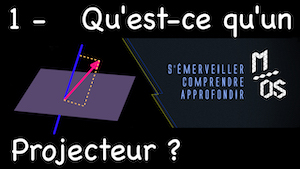
Pour tout ![\epsilon\in\left]0,1-a\right[,](https://math-os.com/wp-content/ql-cache/quicklatex.com-b7388668c3be783d0a0834dbe87e557f_l3.png "Rendered by QuickLaTeX.com") considérons
considérons  définie par :
définie par :
![\[u_{\epsilon}\left(t\right)=\left\{\begin{array}{cc}0 & \text{si }0\leqslant t\leqslant a\\u\left(t\right) & \text{si }a+\epsilon\leqslant t\leqslant1\end{array}\right.\qquad\text{et }u_{\epsilon}\text{ affine sur }\left[a,a+\epsilon\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bc489c8e78a429a07f2b5b3799544d09_l3.png "Rendered by QuickLaTeX.com")
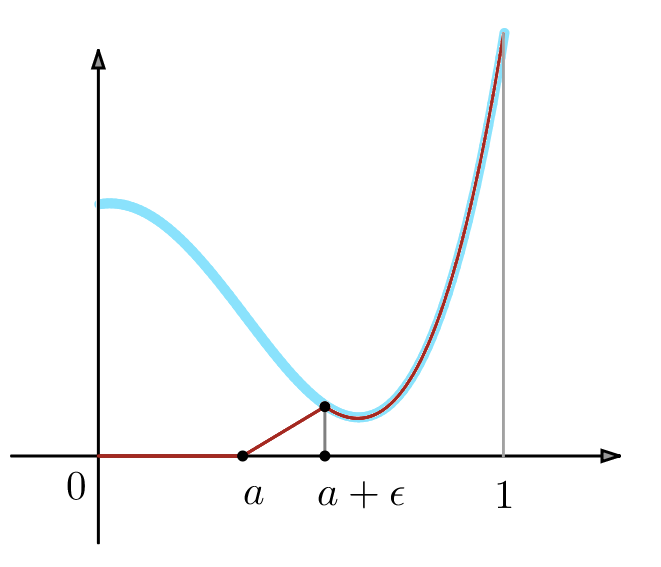
En bleu ciel, le graphe de , en rouge celui de 
Manifestement  et donc :
et donc :
![\[ 0=\left(u\mid u_{\epsilon}\right)=\int_{a}^{a+\epsilon}u\left(t\right)u_{\epsilon}\left(t\right)\thinspace dt+\int_{a+\epsilon}^{1}u\left(t\right)^{2}\thinspace dt\qquad\left(\star\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-280d7f26a530997f0b551f246bffadb7_l3.png "Rendered by QuickLaTeX.com")
![t\in\left[a,a+\epsilon\right],](https://math-os.com/wp-content/ql-cache/quicklatex.com-0a07c75ae4c0d6be64a9a2daeff66a35_l3.png "Rendered by QuickLaTeX.com") on a :
on a : ![\[\left|u_{\epsilon}\left(t\right)\right|\leqslant\left|u\left(a+\epsilon\right)\right|\leqslant\left\Vert u\right\Vert_{\infty}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2c99ea4614e242e046562b64754b8ed5_l3.png "Rendered by QuickLaTeX.com")
![\[ \left|\int_{a}^{a+\epsilon}u\left(t\right)u_{\epsilon}\left(t\right)\thinspace dt\right|\leqslant\int_{a}^{a+\epsilon}\left|u\left(t\right)u_{\epsilon}\left(t\right)\right|\thinspace dt\leqslant\epsilon\left\Vert u\right\Vert_{\infty}^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2fb3722aa83977ce2b9d31af78830a2b_l3.png "Rendered by QuickLaTeX.com")
![\[ \lim_{\epsilon\rightarrow0}\int_{a}^{a+\epsilon}u\left(t\right)u_{\epsilon}\left(t\right)\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9bcb6dc77ffcd3d552cfb863d6b03f03_l3.png "Rendered by QuickLaTeX.com")
En passant à la limite dans  on obtient donc
on obtient donc  ce qui prouve que est identiquement nulle sur
ce qui prouve que est identiquement nulle sur ![\left[a,1\right].](https://math-os.com/wp-content/ql-cache/quicklatex.com-4c045130f95003c2b7c89f7df63bfc36_l3.png "Rendered by QuickLaTeX.com")
Maintenant, notons ![\theta:\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto1](https://math-os.com/wp-content/ql-cache/quicklatex.com-cccb27eaa3d7e56f3023184b0f39b28b_l3.png "Rendered by QuickLaTeX.com") et posons :
et posons :
![\[ c=\frac{1}{a}\int_{0}^{a}u\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d0753b547ff31ae4d88ee302625a596e_l3.png "Rendered by QuickLaTeX.com")
 est la valeur moyenne de sur
est la valeur moyenne de sur ![[0,a]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9c27a7c14938d40ed91f560105f03861_l3.png "Rendered by QuickLaTeX.com") .
.
Alors  et donc
et donc  c’est-à-dire :
c’est-à-dire :
![\[ \int_{0}^{1}u\left(t\right)^{2}\thinspace dt-\frac{1}{a}\left(\int_{0}^{a}u\left(t\right)\thinspace dt\right)\left(\int_{0}^{1}u\left(t\right)\thinspace dt\right)=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c2d11a77eb541fb963f0fbe9735e10dc_l3.png "Rendered by QuickLaTeX.com")
sur : ![\[a\int_{0}^{a}u\left(t\right)^{2}\thinspace dt=\left(\int_{0}^{a}u\left(t\right)\thinspace dt\right)^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ffc6f47d363d3fe3282034531c7b63ea_l3.png "Rendered by QuickLaTeX.com")
On reconnaît (comme pour l’exemple 2 plus haut) le cas d’égalité dans l’inégalité de Cauchy-Schwarz, pour le couple formé par les restrictions à de et  Ces restrictions sont donc linéairement dépendantes : autrement dit, est constante sur
Ces restrictions sont donc linéairement dépendantes : autrement dit, est constante sur ![\left[0,a\right].](https://math-os.com/wp-content/ql-cache/quicklatex.com-0ef7040318d4859f788bf4c88e067bc8_l3.png "Rendered by QuickLaTeX.com")
Par continuité de en  on voit que , et finalement :
on voit que , et finalement :
![\[\boxed{H^{\bot}=\left\{0\right\}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-78690f389cbe2b837e3999b13d00f201_l3.png "Rendered by QuickLaTeX.com")
En particulier : 
7 – Un mot sur les espaces de Hilbert
Soit un espace vectoriel normé réel (pour ne pas sortir trop du contexte de cet article, on reste dans le champ réel, mais ce qui suit s’applique aussi bien aux espaces vectoriels normés sur le corps  des nombres complexes).
des nombres complexes).
La norme en vigueur sur sera notée 
Une suite  de vecteurs de est dite convergente lorsqu’il existe un vecteur
de vecteurs de est dite convergente lorsqu’il existe un vecteur  tel que :
tel que :
![\[\lim_{n\rightarrow\infty}\left\Vert x_{n}-L\right\Vert =0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6fd5cfaea62e3f7e5f036cc335e70444_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\forall\epsilon>0,\thinspace\exists N\in\mathbb{N};\thinspace\forall n\in\mathbb{N},\thinspace n\geqslant N\Rightarrow\left\Vert x_{n}-L\right\Vert \leqslant\epsilon}\qquad\left(CV\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-db90756c0320e9427683cb267b0b6a35_l3.png "Rendered by QuickLaTeX.com")
Cette même suite est dite de Cauchy lorsque :
![\[\boxed{\forall\epsilon>0,\thinspace\exists N\in\mathbb{N},\thinspace\forall\left(p,q\right)\in\mathbb{N}^{2},\thinspace\left(p\geqslant N\text{ et }q\leqslant N\right)\Rightarrow\left\Vert x_{p}-x_{q}\right\Vert \leqslant\epsilon}\qquad\left(CC\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5c6db82191998f47746346518554be45_l3.png "Rendered by QuickLaTeX.com")
Il est facile de voir que toute suite convergente est de Cauchy, mais la réciproque est fausse en général.
Il existe cependant des espaces normés dans lesquels toute suite de Cauchy est convergente : ce sont les espaces normés complets, aussi appelés espaces de Banach, en l’honneur du mathématicien polonais Stefan BANACH (1892 – 1945).
Quant aux espaces préhilbertiens complets, ils sont appelés espaces de Hilbert, en l’honneur, cette fois, du mathématicien allemand David HILBERT (1862 – 1943).
Les espaces complets jouent un rôle très important en analyse. Sans entrer dans les détails, on peut dans un tel espace prouver la convergence d’une suite sans avoir la moindre idée de sa limite (en se contentant de vérifier le critère de Cauchy  ci-dessus). Ceci explique en partie l’importance de cette notion.
ci-dessus). Ceci explique en partie l’importance de cette notion.
Pour en savoir plus sur les suites de Cauchy, on peut consulter cet article.
Nous avons vu, pour tout espace préhilbertien et tout sous-espace les implications suivantes :
Les réciproques des implications  et
et  sont fausses, comme l’ont montré l’exemple 3 et l’exemple 4 plus haut. Cependant, on a le :
sont fausses, comme l’ont montré l’exemple 3 et l’exemple 4 plus haut. Cependant, on a le :
Théorème
Si est un sous-espace fermé de l’espace de Hilbert , alors l’assertion  est vraie.
est vraie.
Les assertions 
 et
et  sont donc équivalentes dans le cas où est complet.
sont donc équivalentes dans le cas où est complet.
Pour voir cela, on commence par établir le :
Théorème de la projection orthogonale
Soit un espace de Hilbert et soit une partie non vide de convexe et fermée. Alors, pour tout il existe un unique  tel que :
tel que :
![\[\left\Vert x-p\right\Vert =\inf\left\{\left\Vert x-a\right\Vert ;\thinspace a\in A\right\} \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-81796603b78d5ff50b2ac7cf224dae0a_l3.png "Rendered by QuickLaTeX.com")
 est caractérisé (parmi tous les vecteurs de
est caractérisé (parmi tous les vecteurs de  par la condition :
par la condition : ![\[\forall a\in A,\:\left(x-p\mid a-p\right)\leqslant0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8225d4d49a69f2f665e6be1e10daab23_l3.png "Rendered by QuickLaTeX.com")
 et
et  est obtus, quel que soit
est obtus, quel que soit  .
.
➡ Vous trouverez une démonstration de ce résultat dans l’article consacré aux suites de Cauchy et aux espaces complets.
Bien entendu, tout sous-espace vectoriel d’un espace vectoriel est une partie non vide et convexe. Par conséquent, si est un sous-espace fermé d’un espace de Hilbert alors pour tout le vecteur  dont le théorème ci-dessus donne l’existence et l’unicité, vérifie pour tout
dont le théorème ci-dessus donne l’existence et l’unicité, vérifie pour tout  et tout
et tout  :
:
![\[\left\Vert x-p\right\Vert \leqslant\left\Vert x-\left(p+tf\right)\right\Vert \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2a8799f3c8cc5a1d8bb65a716afbbc64_l3.png "Rendered by QuickLaTeX.com")
![\[2\left(x-p\mid f\right)\leqslant t\left\Vert f\right\Vert^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bb98a79a05d7208bff0f94dd6ce9dc2c_l3.png "Rendered by QuickLaTeX.com")
 , il vient donc
, il vient donc  . Mais ceci reste vrai en remplaçant le vecteur par son opposé, de sorte que
. Mais ceci reste vrai en remplaçant le vecteur par son opposé, de sorte que  . Bref :
. Bref :  et donc
et donc  .
.
Il est clair que la somme  est directe. On vient donc de montrer que
est directe. On vient donc de montrer que  .
.
Le théorème du supplémentaire orthogonal pour un sous-espace fermé d’un espace de Hilbert est ainsi établi.
Vos questions ou remarques sont les bienvenues. Vous pouvez laisser un commentaire ci-dessous ou bien passer par le formulaire de contact.