
Prouver qu’un espace vectoriel est la somme directe de deux (ou plusieurs) sous-espaces est une question omniprésente dans le programme d’algèbre linéaire des deux premières années d’enseignement supérieur scientifique. Elle se traite généralement en raisonnant par analyse-synthèse.
Cet article tâchera de faire le point sur cette question, en partant de zéro (ou presque).
1 – Quelques rappels de cours
Dans ce qui suit,  et
et  désignent respectivement un corps et un
désignent respectivement un corps et un  espace vectoriel.
espace vectoriel.
Le plus souvent,  ou
ou  Plus rarement,
Plus rarement,  ou
ou  (avec
(avec  premier).
premier).
Définition 1
Etant donnés deux sous-espaces vectoriels  et
et  de , on note :
de , on note :
![\[F+G=\{x+y;\,x\in F\text{ et }y\in G\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7738fc859400cc14455bfa1e028ffab8_l3.png "Rendered by QuickLaTeX.com")
On dit que  est la somme des deux sous-espaces et .
est la somme des deux sous-espaces et .
On vérifie aisément que est un sous-espace vectoriel de .

Il ne faut pas confondre avec  qui, en général, n’est pas un sous-espace vectoriel. Il est cependant facile de voir que est le sous-espace engendré par (preuve en annexe).
qui, en général, n’est pas un sous-espace vectoriel. Il est cependant facile de voir que est le sous-espace engendré par (preuve en annexe).
Comme le montre l’exemple qui suit, il faut s’attendre à ce qu’un vecteur  puisse généralement s’exprimer de plusieurs manières sous la forme
puisse généralement s’exprimer de plusieurs manières sous la forme  avec
avec  et
et  .
.
Exemple
Considèrons le  espace vectoriel
espace vectoriel  et ses deux sous-espaces :
et ses deux sous-espaces :
![\[F=\{(0,y,z)\in\mathbb{R}^3;\,(y,z)\in\mathbb{R}^2\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2fa7ea88913ae421c94a711ce5e28156_l3.png "Rendered by QuickLaTeX.com")
![\[G=\{(x,0,z)\in\mathbb{R}^3;\,(x,z)\in\mathbb{R}^2\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-72c796c7072644d631afb6d6df3376f2_l3.png "Rendered by QuickLaTeX.com")
On constate que, pour tout  :
:
![\[(0,0,0)=(0,0,a)+(0,0,-a)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5d5f842f63146a5363bcd2befee3b5a8_l3.png "Rendered by QuickLaTeX.com")
comme somme d’un vecteur de et d’un vecteur de .
Ceci nous conduit naturellement à la définition suivante :
Définition 2
On conserve les notations introduites plus haut.
La somme est dite directe lorsque tout vecteur peut s’exprimer d’une seule façon sous la forme avec et .
On note alors  .
.
Il faut bien voir que désigne exactement le même objet mathématique que , mais avec l’information supplémentaire ( 🙂 jeu de mots) indiquée dans la définition ci-dessus.
Proposition (caractérisation d’une somme directe)
Etant donnés deux sous-espaces et de , les trois assertions suivantes sont équivalentes :
- La somme est directe

- Pour tout
 , si
, si  alors
alors 
Preuve (cliquer pour déplier / replier)
![\[\fcolorbox{black}{myBlue}{$(1)\Rightarrow(2)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-79e6a28f80709f78c3207f249011598f_l3.png "Rendered by QuickLaTeX.com")
Si  , alors
, alors  peut s’exprimer comme la somme d’un vecteur de et d’un vecteur de comme ceci :
peut s’exprimer comme la somme d’un vecteur de et d’un vecteur de comme ceci :
![\[z=z+0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f5cdda59dd41019194b2b78df9fd8a34_l3.png "Rendered by QuickLaTeX.com")
![\[z=0_E+z\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-65dd41d4704c886e6ea09b27bcd0071b_l3.png "Rendered by QuickLaTeX.com")
 . Ceci prouve que
. Ceci prouve que  et l’inclusion réciproque est triviale.
et l’inclusion réciproque est triviale. ![\[\fcolorbox{black}{myBlue}{$(2)\Rightarrow(3)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-023aee8ceef0561a46cd9406dff8c7c4_l3.png "Rendered by QuickLaTeX.com")
Soit tel que . On observe que :
![\[x=-y\in G\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-96ac2fa7bc5143dbf83467aab98be90f_l3.png "Rendered by QuickLaTeX.com")
est stable par combinaison linéaire et, a fortiori, par passage à l’opposé) et donc  .
.
Il en résulte (d’après (2)) que .
![\[\fcolorbox{black}{myBlue}{$(3)\Rightarrow(1)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d3185fe3a4e44c8465a354b533241cf9_l3.png "Rendered by QuickLaTeX.com")
Soient  et
et  tels que
tels que  .
.
Alors  et comme
et comme  et
et  , il résulte de l’hypothèse (3) que
, il résulte de l’hypothèse (3) que  .
.
Moralité :  ,
,  et l’on a prouvé que la somme est directe.
et l’on a prouvé que la somme est directe.
Lorsque deux sous-espaces et de sont en somme directe, il se peut que cette somme directe soit égale à tout entier … ou pas !
Définition 3
Deux sous-espace et de sont dits supplémentaires lorsque :
![\[E=F\oplus G\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9b4e10ebef9638229be01f8c3859cfde_l3.png "Rendered by QuickLaTeX.com")
peut s’exprimer, de manière unique, comme la somme d’un vecteur de et d’un vecteur de .
A priori, la preuve d’une égalité du type  doit comporter trois points :
doit comporter trois points :
- Point 0 : prouver que
 .
. - Point 1 : prouver que
 .
. - Point 2 : prouver que la somme est directe.
Mais le point 0 est sans objet ! En effet, l’inclusion est évidente puisque  sont des sous-espaces de ,
sont des sous-espaces de ,
Il ne reste donc que deux points, le second pouvant être reformulé grâce à la proposition démontrée plus haut :
- Point 1 : prouver que .
- Point 2 : prouver que .
Le premier point soulève généralement une difficulté spécifique …
On doit en effet se donner un vecteur quelconque  et prouver l’existence de vecteurs et tels que
et prouver l’existence de vecteurs et tels que  . Mais selon le contexte, il peut ne pas être évident d’aller dénicher deux tels vecteurs
. Mais selon le contexte, il peut ne pas être évident d’aller dénicher deux tels vecteurs  et
et  …
…
Cependant, puisqu’au final il doit exister (pour un donné) un unique couple vérifiant  , il doit y avoir un moyen de lui mettre la main dessus sans avoir à jouer aux devinettes !
, il doit y avoir un moyen de lui mettre la main dessus sans avoir à jouer aux devinettes !
Ce moyen est un mode de raisonnement très courant, que nous allons maintenant décrire : le raisonnement par analyse-synthèse.
2 – Principe de preuve par analyse-synthèse
Afin de déterminer les solutions d’un certain problème, on procède de la manière suivante …
Dans un premier temps, on cherche des conditions nécessairement vérifiées par une éventuelle solution.
Si ces conditions sont suffisamment contraignantes, on débouche sur un ensemble assez petit (peut-être fini) de solutions possibles (ou « candidates ») … Cette première partie est appelée « l’analyse » ou « la recherche d’une condition nécessaire ».
Mais attention, rien ne dit à ce stade que ces solutions possibles sont des solutions effectives ! Il se pourrait même que le problème en question ne possède aucune solution.
Pour le savoir, on doit examiner les solutions candidates et déterminer, pour chacune d’elles, s’il s’agit d’une solution effective ou bien si elle doit être écartée. Cette seconde partie est appelée « la synthèse » ou « la recherche d’une condition suffisante ».
Remarque
Si les termes « condition nécessaire » et « condition suffisante » vous paraissent confus, le remède est simple ! Allez donc jeter un coup d’œil à cet article de vulgarisation.
Pour caricaturer le raisonnement par analyse-synthèse, il m’arrive de raconter l’exemple (farfelu) suivant à mes étudiants : imaginez qu’on vous demande de prouver l’existence, dans votre appartement, d’une canette de bière bien fraîche !
Une approche pas très futée consisterait à visiter systématiquement tout l’appartement : l’entrée, le séjour, les chambres à coucher, la salle de bain, etc … jusqu’à ce que vous mettiez la main sur cette fameuse canette.
Il semble judicieux de procéder autrement : si votre appartement abrite effectivement une canette de bière bien fraîche, alors celle-ci doit nécessairement se trouver au réfrigérateur (analyse).
Maintenant, il suffit de filer tout droit dans la cuisine, d’ouvrir la porte du frigo et … de trouver la canette qui nous y attend bien sagement (synthèse).
Nous allons appliquer ce mode de raisonnement au problème particulier qui nous intéresse, à savoir : établir une égalité du type .
Analyse
Donnons-nous un vecteur et supposons qu’il existe des vecteurs et tels que .
En profitant du contexte (voir exemples à la section 3 ci-dessous), il est possible de montrer que et sont déterminés de façon unique en fonction de .
Synthèse
Si et sont définis par les formules obtenues à la fin de la partie « analyse », on doit vérifier que :
Afin d’illustrer cela, détaillons quelques exemples.
3 – Six exemples détaillés
Exemple 1
Considérons les vecteurs de  suivants :
suivants :
![\[v=(2,1)\qquad\text{et}\qquad w=(1,-3)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9568626f1605379cdda3e964d1b533a2_l3.png "Rendered by QuickLaTeX.com")
 et
et  sont supplémentaires dans , c’est-à-dire que :
sont supplémentaires dans , c’est-à-dire que : ![\[\mathbb{R}^2=\mathbb{R}v\oplus\mathbb{R}w\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-74c9c7c0afdbca851e1553898e390e91_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Raisonnons par analyse-synthèse.
Soit  . Supposons qu’il existe et
. Supposons qu’il existe et  tels que :
tels que :
![\[(x,y)=(2a,a)+(b,-3b)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0d92b420ae0c09cc00af1aa9c1e33dce_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{\begin{matrix}x & = & 2a+b\\y & = & a-3b\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fdd0fc47d1d3e8d6656ebb70a5fdd418_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{\begin{matrix}a & = & \dfrac{3x+y}{7}\\\\b & = & d\frac{x-2y}{7}\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0db7c2a3b6f8a39c38d8f0ae0774b360_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si  et
et  sont ainsi définis, on vérifie facilement que :
sont ainsi définis, on vérifie facilement que :

Finalement :
![\[\mathbb{R}^2=\mathbb{R}(2,1)\oplus\mathbb{R}(1,-3)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-31a0b3663b033e869a99f4cbeef4e526_l3.png "Rendered by QuickLaTeX.com")
Plus généralement, si  et
et  sont deux vecteurs non colinéaires d’un espace vectoriel de dimension 2, alors :
sont deux vecteurs non colinéaires d’un espace vectoriel de dimension 2, alors :
![\[E=\mathbb{K}v\oplus\mathbb{K}w$\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4b8def05027da1e12bfdf8f5fbdafa67_l3.png "Rendered by QuickLaTeX.com")
Encore plus généralement, si  est une famille libre de vecteurs d’un espace vectoriel de dimension
est une famille libre de vecteurs d’un espace vectoriel de dimension  alors :
alors :
![\[E=\bigoplus_{i=1}^n\mathbb{K}e_i\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6a29e93d3d668846bc48107f4f31c578_l3.png "Rendered by QuickLaTeX.com")
Exemple 2
Soient  et
et  . Alors :
. Alors :
![\[\mathbb{R}^3=\mathbb{R}v\oplus H\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-de9aa6646c78e30bba77a2f9b2ec9ff7_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Raisonnons par analyse-synthèse.
Soit  . Supposons qu’il existe
. Supposons qu’il existe  et
et  tels que :
tels que :
![\[(x,y,z)=(2\lambda,\lambda,-\lambda)+(a,b,c)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ac99564ab72e5541a584ad8a969483e1_l3.png "Rendered by QuickLaTeX.com")
 ) :
) : ![\[(x,y,z)=(2\lambda,\lambda,-\lambda)+(a,b,a+2b)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8baa98878a4b898a01a21c33235dc5a0_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{\begin{matrix}x & = & 2\lambda+a & \qquad(1)\\y & = & \lambda+b & \qquad(2)\\z & = & -\lambda+a+2b & \qquad(3)\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-177bacac54aae7b98475398afbb8114c_l3.png "Rendered by QuickLaTeX.com")
Alors, en effectuant la combinaison  :
:
![\[\lambda=\boxed{\frac{x+2y-z}{5}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-994101e1db7ead7525ad77b8b5bedd71_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[a=x-2\lambda=x-\frac{2x+4y-2z}{5}=\boxed{\frac{3x-4y+2z}{5}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-768ccc2571f026c3db84d9b381e256bb_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[b=y-\lambda=y-\frac{x+2y-z}{5}=\boxed{\frac{-x+3y+z}{5}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7252ab50eca68dbc6ccbf7b825162dec_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si  , et sont respectivement définis par les formules encadrées, alors :
, et sont respectivement définis par les formules encadrées, alors :
![\[\left\{\begin{matrix}X=(2\lambda,\lambda,-\lambda) & \in & \mathbb{R}(2,1,-1)\\\\Y=\displaystyle{(\frac{3x-4y+2z}{5},\frac{-x+3y+z}{5},\frac{x+2y+4z}{5})} & \in & H\\\\X+Y & = & (x,y,z)\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1f011422b4512b56007d622295dadce7_l3.png "Rendered by QuickLaTeX.com")
Finalement :
Plus généralement, si  est un hyperplan de (c’est-à-dire, lorsque est de dimension
est un hyperplan de (c’est-à-dire, lorsque est de dimension  , un sous-espace de dimension
, un sous-espace de dimension  et, en toute généralité, le noyau d’une forme linéaire non nulle) et si
et, en toute généralité, le noyau d’une forme linéaire non nulle) et si  , alors
, alors  .
.
Preuve (cliquer pour déplier / replier)
Soit un -espace vectoriel et soit  une forme linéaire sur (c’est-à-dire une application linéaire de dans ).
une forme linéaire sur (c’est-à-dire une application linéaire de dans ).
Supposons non nulle et notons son noyau (qui est donc strictement contenu dans ).
Soit encore  ; montrons que
; montrons que
![\[E=H\oplus\mathbb{K}a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-3ba6233688e27021bd843176b108e21a_l3.png "Rendered by QuickLaTeX.com")
Pour cela, raisonnons, encore et toujours, par analyse-synthèse.
Etant donné  , supposons qu’il existe
, supposons qu’il existe  et
et  tels que :
tels que :
![\[x=h+\lambda a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-344df3aaea13ac0a7c43998b1eb479ec_l3.png "Rendered by QuickLaTeX.com")
On appliquant , on voit que :
![\[\phi(x)=\phi(h)+\lambda\phi(a)=\lambda\phi(a)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2b439f7f764471cfea471bd90f868676_l3.png "Rendered by QuickLaTeX.com")
 , il s’ensuit que :
, il s’ensuit que : ![\[\lambda=\frac{\phi(x)}{\phi(a)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-342fee381c17c9d0e7cc7dff85348b00_l3.png "Rendered by QuickLaTeX.com")
![\[h=x-\frac{\phi(x)}{\phi(a)} a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-63b169a00807066b438c8b13f33721e2_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si  et sont ainsi définis, alors d’évidence
et sont ainsi définis, alors d’évidence  et de plus :
et de plus :

.
Exemple 3
Notons le espace vectoriel des applications de  dans et considérons les deux sous-ensembles suivants :
dans et considérons les deux sous-ensembles suivants :
 désigne l’ensemble des applications
désigne l’ensemble des applications  qui sont paires, c’est-à-dire telles que :
qui sont paires, c’est-à-dire telles que :
![\[\fcolorbox{black}{myBlue}{$\forall x\in\mathbb{R},\,f(-x)=f(x)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4628a5743385d371dca0d896e27ccfbc_l3.png "Rendered by QuickLaTeX.com")
 désigne l’ensemble des applications qui sont impaires, c’est-à-dire telles que :
désigne l’ensemble des applications qui sont impaires, c’est-à-dire telles que :
![\[\fcolorbox{black}{myBlue}{$\forall x\in\mathbb{R},\,f(-x)=-f(x)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d1ce032040e00057294a0a773b461930_l3.png "Rendered by QuickLaTeX.com")
Avec ces notations, et sont des sous-espaces vectoriels de et de plus :
![\[\fcolorbox{black}{myBlue}{$E=\mathcal{P}\oplus\mathcal{I}$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6730c668e8d81e8c100134ea0172bd5a_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Raisonnons par analyse-synthèse.
Soit . Supposons qu’il existe  et
et  telles que
telles que  .
.
Alors, pour tout  :
:
![\[\left\{\begin{matrix}f(x) & = & p(x)+i(x)\\f(-x) & = & p(-x)+i(-x)\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5bb1bbcb17ce76519b8aeac191e4123a_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{\begin{matrix}f(x) & = & p(x)+i(x)\\f(-x) & = & p(x)-i(x)\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e91dace8cea70ac79239312e8eae06ff_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{p(x)=\frac{f(x)+f(-x)}{2}}\qquad\text{et}\qquad\boxed{i(x)=\frac{f(x)-f(-x)}{2}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e1e3ae9c3dceeb62f3cea5ddebc4c789_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si et  sont ainsi définies, alors on voit immédiatement que est paire, que est impaire et que
sont ainsi définies, alors on voit immédiatement que est paire, que est impaire et que  .
.
En conclusion, toute application  peut s’écrire, de manière unique, comme la somme d’une application paire et d’une application impaire. Autrement dit :
peut s’écrire, de manière unique, comme la somme d’une application paire et d’une application impaire. Autrement dit :
![\[E=\mathcal{P}\oplus\mathcal{I}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9a86503b295247f7a45d0b183f36fc01_l3.png "Rendered by QuickLaTeX.com")
En particulier, la fonction exponentielle se décompose en ses parties paire et impaire, respectivement définies par :
![\[x\mapsto\frac{e^x+e^{-x}}{2}\qquad\text{et}\qquad x\mapsto\frac{e^x-e^{-x}}{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b7877c828f15e45b5f6c6f6cbd2d9bf5_l3.png "Rendered by QuickLaTeX.com")
La première de ces deux fonctions est appelée « cosinus hyperbolique » et la seconde « sinus hyperbolique ». Elles sont traditionnellement notée cosh et sinh (notation internationale … en France, on est habitué aux notations ch et sh).
Sans entamer une trop longue digression à ce sujet, on peut préciser que le qualificatif d’hyperbolique provient du fait que les deux branches de l’hyperbole d’équation  admettent les représentations paramétriques suivantes :
admettent les représentations paramétriques suivantes :
![\[\left\{\begin{matrix}x & = & -\text{ch}(t)\\y & = & \text{sh}(t)\end{matrix}\right.\qquad\text{pour la branche de gauche}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-43ba69f0ae7f58596d639e2c67c0e021_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{\begin{matrix}x & = & \text{ch}(t)\\y & = & \text{sh}(t)\end{matrix}\right.\qquad\text{pour la branche de droite}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-68cb4f854ced3138f101ae494107212f_l3.png "Rendered by QuickLaTeX.com")
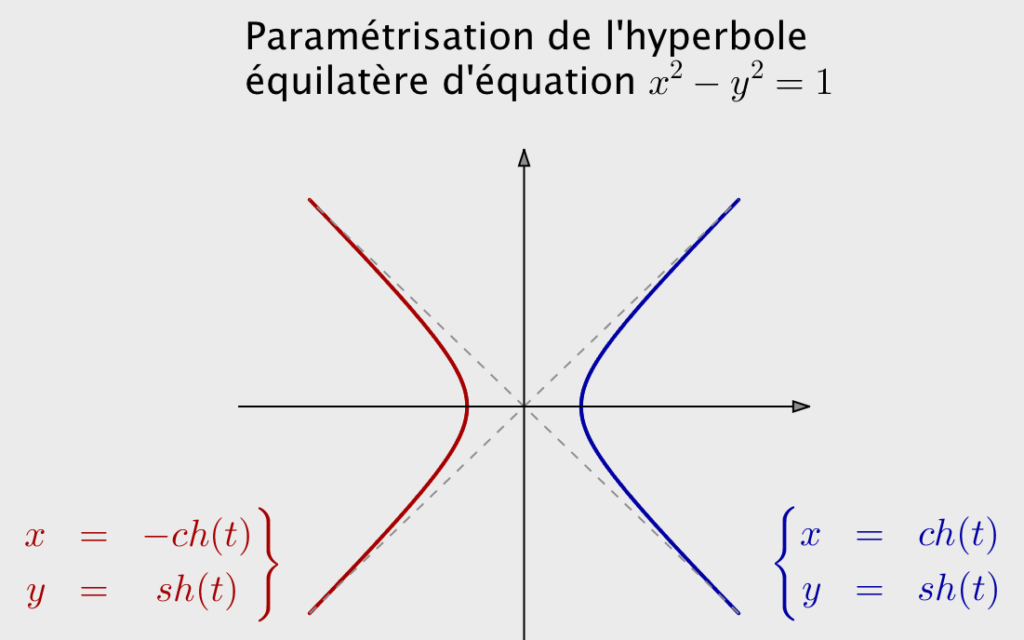
Ceci est à rapprocher du fait que le cercle unité admet la célèbre représentation paramétrique :
![\[\left\{\begin{matrix}x & = & \cos(t)\\y & = & \sin(t)\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1d9fadf77b498108d532ee2e2cbc0d19_l3.png "Rendered by QuickLaTeX.com")
ce qui explique la terminologie de trigonométrie circulaire.
Exemple 4
Soit un espace vectoriel et soit un endomorphisme de tel que  .
.
Alors :
![\[E=\ker(p)\oplus\ker(p-id_E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d3c5b5ca0762ce6be5076d79d3841f5e_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Raisonnons par analyse-synthèse.
Soit . Supposons qu’il existe  et
et  tels que :
tels que :
![\[a+b=x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-353f37caf79982ccfb0bfda79cdd0290_l3.png "Rendered by QuickLaTeX.com")
En appliquant à chaque membre de cette égalité, il vient :
![\[p(a)+p(b)=p(x)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-11b8fe62dfe1739603f14fba3c4c1c50_l3.png "Rendered by QuickLaTeX.com")
 et
et  et par conséquent :
et par conséquent : ![\[\boxed{b=p(x)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d0fa94b172d15025f47405deb72b990c_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{a=x-p(x)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a56badcae974019999b3dfe9b4f02144_l3.png "Rendered by QuickLaTeX.com")
et sont ainsi définis, alors : ![\[p(a)=p(x-p(x))=p(x)-p^2(x)=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6b2aea572f9d8cc0ae0a1c04772f1bc3_l3.png "Rendered by QuickLaTeX.com")
, et : ![\[(p-id_E)(b)=p(b)-b=p^2(x)-p(x)=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4886064a70ef9269a154c12bd0959203_l3.png "Rendered by QuickLaTeX.com")
 .
.
On a bien prouvé que :
Cet exemple est fondamental. Les endomorphismes vérifiant (ce qu’on peut aussi noter  ) sont appelés projecteurs et jouent un rôle central en algèbre linéaire et en géométrie.
) sont appelés projecteurs et jouent un rôle central en algèbre linéaire et en géométrie.
Précisons que si est un projecteur, son sous-espace invariant  est confondu avec son image. Sauriez-vous établir cela ? Réponse en annexe.
est confondu avec son image. Sauriez-vous établir cela ? Réponse en annexe.
Aux projecteurs sont associés d’autres endomorphismes d’usage fréquent : les symétries. Ce sont les  vérifiant
vérifiant  . Sauriez-vous prouver que si
. Sauriez-vous prouver que si  vérifie cette condition, alors
vérifie cette condition, alors  ? Réponse en annexe également …
? Réponse en annexe également …
Exemple 5
Soit un espace vectoriel et soit  un endomorphisme tel que
un endomorphisme tel que  . Alors :
. Alors :
![\[E=\ker(f)\oplus\ker(f^2+id_E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-680c08cf455b91e6c0203e1bc19dd92c_l3.png "Rendered by QuickLaTeX.com")
Détail des calculs (cliquer pour déplier / replier)
Soit . Supposons qu’il existe  et
et  tels que :
tels que :
 aux deux membres de cette égalité. Il vient :
aux deux membres de cette égalité. Il vient : ![\[f^2(a)+f^2(b)=f^2(x)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a94a0042d6d2335815392bc86ded8a41_l3.png "Rendered by QuickLaTeX.com")
 , d’où
, d’où  et d’autre part
et d’autre part  ; par conséquent :
; par conséquent : ![\[\boxed{b=-f^2(x)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-80ade738754651abf5a24dd216033626_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{a=f^2(x)+x}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-85d39777eb645e52fcd1b1be9cd2df21_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si et sont ainsi définis, alors on constate que :


ce qui montre déjà que et  . En outre, il est clair que
. En outre, il est clair que  . Ceci termine la preuve.
. Ceci termine la preuve.
Cet exemple et le précédent sont deux cas particuliers d’un résultat général, connu sous le nom de lemme de décomposition des noyaux. Pour en savoir plus à ce sujet, on pourra consulter cette vidéo.
Exemple 6
Considérons l’espace des applications de classe  de
de ![[0,1]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5f5471f4f434bda8dbac7842a4433417_l3.png "Rendered by QuickLaTeX.com") dans ainsi qu’un entier
dans ainsi qu’un entier  .
.
Notons alors :
![\[F=\text{vect}\{e_1,\ldots,e_n\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-dec0b40d5a6833477281b4743099be31_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[e_k:[0,1]\to\mathbb{R},\,t\mapsto t^k\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f87c9410d4c2ce7ee634550d430b3a6c_l3.png "Rendered by QuickLaTeX.com")
ainsi que :
![\[G=\{u\in E;\,\forall k\in\llbracket1,n\rrbracket,\,\int_0^1t^k\,u'(t)\,dt=0\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-89ad46011b77388b31d1a13bd974801a_l3.png "Rendered by QuickLaTeX.com")
Alors : .
Preuve (cliquer pour déplier / replier)
Il se trouve que est (d’évidence) un sous-espace de dimension finie de et que n’est autre que son orthogonal relativement au produit scalaire défini par :
![\[\forall(f,g)\in E^2,\,\left(f\mid g\right)=f(0)\,g(0)+\int_0^1f'(t)g'(t)\,dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6ddc830a5e9b0ddfa6a0ffaf1d614e0b_l3.png "Rendered by QuickLaTeX.com")
La conclusion est alors conséquence d’un résultat général, à savoir que si est un sous-espace de dimension finie d’un espace préhilbertien réel , alors  . Pour aller plus loin sur ce terrain, on pourra consulter cet article.
. Pour aller plus loin sur ce terrain, on pourra consulter cet article.
4 – L’astuce de la dimension finie
Soient, à nouveau, un espace vectoriel et deux sous-espaces et de .
Si est de dimension finie et si l’on veut prouver que , alors il suffit de vérifier que :




ou bien de vérifier que :



➥ En effet, sous les hypothèses et  :
:
![\[\dim(F\oplus G)=\dim(F)+\dim(G)=\dim(E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bad5856cf8dd5d852412563491da2532_l3.png "Rendered by QuickLaTeX.com")
.
➥ Et sous les hypothèses et  , on voit déjà (avec ) que
, on voit déjà (avec ) que  , puis d’après la formule de Grassmann :
, puis d’après la formule de Grassmann :
![\[\dim(F\cap G)=\dim(F)+\dim(G)-\dim(F+G)=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1593838c10453f70f7225199985a265c_l3.png "Rendered by QuickLaTeX.com")
et donc que .
Pour l’essentiel, cette méthode nous épargne le calcul explicite de la décomposition d’un vecteur quelconque de en la somme d’un vecteur de et d’un vecteur de .
Ceci est un avantage dans la mesure où la dose de calcul est allégée … mais cela peut constituer un inconvénient si l’on a besoin de connaître explicitement cette fameuse décomposition (par exemple, pour déterminer l’expression analytique d’un projecteur une d’une symétrie).
Donnons un exemple d’utilisation de cette idée…
Exemple
Considérons un espace vectoriel de dimension finie et un endomorphisme  de .
de .
On suppose qu’il existe  tel que :
tel que :
- (1)

- (2)

Montrons que, sous ces hypothèses :
![\[\fcolorbox{black}{myBlue}{$E=\text{Im}(f)\oplus\ker(f)$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-42fd0e07f4b1511d965109b354af8eb1_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
L’hypothèse (1) se traduit par l’inclusion  .
.
Il est par ailleurs évident que  .
.
Donc, d’après (2) :

ce qui impose : 
En outre, d’après la formule de Grassmann :
![\[\dim(\text{Im}(f)\cap\ker(f))=\text{rg}(f)+\dim(\ker(f))-\dim(\text{Im}(f)+\ker(f))\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2f7a4da316b6d006e429ebacee09ec0a_l3.png "Rendered by QuickLaTeX.com")
et donc, en appliquant à la formule du rang :
![\[\dim(\text{Im}(f)\cap\ker(f))=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b789ff397f3ff7246ced88ed1ec22e4f_l3.png "Rendered by QuickLaTeX.com")
![\[\text{Im}(f)\cap\ker(f)=\{0_E\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-82cca995b570e8302975bfbc40a1c7da_l3.png "Rendered by QuickLaTeX.com")
Remarque 1
Les conditions (1) et (2) ci-dessus sont remplies dans le cas où est un projecteur. En effet, si l’on pose  , alors :
, alors :
- d’une part

- d’autre part

Ceci permet de retrouver l’égalité  qui est bien connue dans ce cas (voir l’exemple 4 ci-dessus).
qui est bien connue dans ce cas (voir l’exemple 4 ci-dessus).
Remarque 2
Les conditions (1) et (2) entraînent que l’image et le noyau de sont supplémentaires. Cette implication est en fait une équivalence.
En effet, introduisons le projecteur  sur
sur  et parallèlement à
et parallèlement à  .
.
- D’une part, pour tout , on a
 puisque
puisque  . Ainsi :
. Ainsi :  .
. - D’autre part, si
 , alors
, alors  , ce qui montre que
, ce qui montre que  et donc
et donc  . Mais alors
. Mais alors  et donc
et donc  . Ceci prouve que
. Ceci prouve que  est un endomorphisme injectif et donc un automorphisme de .
est un endomorphisme injectif et donc un automorphisme de .
5 – Quelques mots au sujet de 
Bien que ce ne soit pas le thème principal de cet article, on ne pouvait pas laisser sous silence la généralisation naturelle de ce qui précède au cas de plusieurs sous-espaces.
Voici donc, à nouveau, les définitions 1 et 2 données au tout début, mais sous une forme élargie :
Définition
Etant donnés un entier  et des sous-espaces vectoriels
et des sous-espaces vectoriels  de , on note :
de , on note :
![\[\sum_{i=1}^nE_i=\left\{\sum_{i=1}^nx_i;\,\forall i\in\llbracket1,n\rrbracket,\,x_i\in E_i\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2fa4d4bea6b78b7b7c34426c53bc8e22_l3.png "Rendered by QuickLaTeX.com")
En bon français, cela signifie simplement que  est l’ensemble des vecteurs pouvant s’écrire comme la somme d’un vecteur de
est l’ensemble des vecteurs pouvant s’écrire comme la somme d’un vecteur de  , d’un vecteur de
, d’un vecteur de  , etc …, d’un vecteur de
, etc …, d’un vecteur de  .
.
Cette somme  est dite directe lorsque tout vecteur de
est dite directe lorsque tout vecteur de  peut s’écrire d’une seule manière sous cette forme. On note alors
peut s’écrire d’une seule manière sous cette forme. On note alors  au lieu de .
au lieu de .
Nous avons vu plus haut une proposition caractérisant les sommes directes de deux sous-espaces. Voici comment on peut la généraliser à un nombre quelconque de sous-espaces :
Proposition
Soient des sous-espaces vectoriels de .
Les assertions suivantes sont équivalentes :
- La somme est directe
- Quels que soient les vecteurs
 …
…  :
:![\[\sum_{i=1}^nx_i=0_E\Rightarrow\forall i\in\llbracket1,n\rrbracket,\,x_i=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2c60588d254e3bdf14d4bb28a490e111_l3.png "Rendered by QuickLaTeX.com")
Une erreur classique consiste à affirmer que la somme des  serait directe si, et seulement si,
serait directe si, et seulement si,  . C’est correct pour
. C’est correct pour  , mais c’est faux dès que
, mais c’est faux dès que  .
.
Par exemple, l’intersection de trois droites vectorielles distinctes de est réduite à  mais la somme de ces trois droites n’est évidemment pas directe (sans quoi sa dimension serait égale à 3, ce qui est un peu trop pour un sous-espace de ).
mais la somme de ces trois droites n’est évidemment pas directe (sans quoi sa dimension serait égale à 3, ce qui est un peu trop pour un sous-espace de ).
Donnons un exemple simple et significatif de somme directe de plusieurs sous-espaces.
Exemple : somme directe de sev propres
Soit un espace vectoriel et soit  .
.
Supposons que  (avec
(avec  ) soient des valeurs propres de
) soient des valeurs propres de  , deux à deux distinctes.
, deux à deux distinctes.
Notons, pour tout  :
:
![\[E_i=\ker(u-\lambda_i \,id_E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1fb9258c6a29cfffa6e8e679da9054ee_l3.png "Rendered by QuickLaTeX.com")
Alors la somme  est directe.
est directe.
Preuve (cliquer pour déplier / replier)
On procède par récurrence sur le nombre de valeurs propres.
Pour  , il n’y a rien à démontrer.
, il n’y a rien à démontrer.
Supposons la propriété établie pour un certain et soient alors  des valeurs propres deux à deux distinctes de .
des valeurs propres deux à deux distinctes de .
Pour montrer que la somme  est directe, utilisons la caractérisation donnée dans la proposition précédente.
est directe, utilisons la caractérisation donnée dans la proposition précédente.
Soient , …,  tels que :
tels que :
![\[\sum_{i=1}^{r+1}x_i=0_E\qquad\left(\spadesuit}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-90f447a8050e014026abd5991a75779b_l3.png "Rendered by QuickLaTeX.com")
Appliquons :
![\[\sum_{i=1}^{r+1}\lambda_i\,x_i=0_E\qquad\left(\clubsuit\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-88c0073dda46402d4a0d20e9875fc928_l3.png "Rendered by QuickLaTeX.com")
Retranchons à  l’égalité
l’égalité  préalablement multipliée par
préalablement multipliée par  :
:
![\[\sum_{i=1}^r\left(\lambda_i-\lambda_{r+1}\right)x_i=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-864269c495b4d7a305964698ed7c1b73_l3.png "Rendered by QuickLaTeX.com")
L’hypothèse de récurrence permet d’affirmer que :
![\[\forall i\in\llbracket1,r\rrbracket,\,\left(\lambda_i-\lambda_{r+1}\right)x_i=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-14c9070960d39c9dcecb5a617d7923cc_l3.png "Rendered by QuickLaTeX.com")
sont tous différents de , on voit que : ![\[\forall i\in\llbracket1,r\rrbracket,\,x_i=0_E\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-896b8284bee15974bbfeba32166c395b_l3.png "Rendered by QuickLaTeX.com")
, il s’ensuit que  .
.
Attention, cette somme directe n’a aucune raison d’être égale à tout entier !
Cependant, le cas où  est important, car il existe alors une base de (obtenue en concaténant des bases de chacun des ) dans laquelle est représenté par une matrice diagonale. On dit, dans ce cas, que l’endomorphisme est diagonalisable.
est important, car il existe alors une base de (obtenue en concaténant des bases de chacun des ) dans laquelle est représenté par une matrice diagonale. On dit, dans ce cas, que l’endomorphisme est diagonalisable.
Annexe
Dans cette section, on détaille les réponses aux questions laissées en suspens plus haut.
Proposition annexe 1
Si et sont deux sous-espaces vectoriels de , alors :
![\[F+G=\text{vect}\left(F\cup G\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-15e02049ad00a1c99efefa15bd357a0e_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Rappelons au préalable que si  , on désigne par
, on désigne par  l’ensemble des combinaisons linéaires de vecteurs de
l’ensemble des combinaisons linéaires de vecteurs de  . Il s’agit d’un sous-espace de , qui est aussi l’intersection de la famille des sous-espaces contenant .
. Il s’agit d’un sous-espace de , qui est aussi l’intersection de la famille des sous-espaces contenant .
En outre, tout sous-espace de contenant contient nécessairement .
Cela dit …
Il est clair que  et que
et que  . Ainsi
. Ainsi  et comme est un sev de , alors
et comme est un sev de , alors  .
.
Par ailleurs, si  , alors il existe
, alors il existe  et
et  tels que
tels que  , ce qui montre que
, ce qui montre que  .
.
Proposition annexe 2
Si est un projecteur, alors son sous-espace invariant coïncide avec son image.
Preuve (cliquer pour déplier / replier)
Si  , alors
, alors  , et donc
, et donc  . Ceci prouve que
. Ceci prouve que  . Noter que cette inclusion reste valable pour n’importe quel endomorphisme !
. Noter que cette inclusion reste valable pour n’importe quel endomorphisme !
Réciproquement, si , alors il existe  tel que
tel que  , d’où
, d’où  . Et ceci prouve l’inclusion inverse.
. Et ceci prouve l’inclusion inverse.
Proposition annexe 3
Soit vérifiant . Alors :
![\[E=\ker(s-id_E)\oplus\ker(s+id_E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c5589a4dd660d93551b25962561afee1_l3.png "Rendered by QuickLaTeX.com")
Preuve 1 (cliquer pour déplier / replier)
Soit . Supposons qu’il existe  et
et  tels que
tels que  . En appliquant , on obtient
. En appliquant , on obtient  puis, par somme et différence :
puis, par somme et différence :
![\[\left\{\begin{matrix}a & = & \frac12\left(x+s(x)\right)\\\\b & = & \frac12\left(x-s(x)\right) \end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-14219b2779a8b0b59f1ac7f3138a6f19_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, si et sont ainsi définis, alors il est immédiat que .
En outre :


donc et .
Preuve 2 (cliquer pour déplier / replier)
Posons :
![\[p=\frac12\left(id_E+s\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f4e90268a9b0425be8d2b227fbd7684d_l3.png "Rendered by QuickLaTeX.com")
![\[p^2=\frac14\left(id_E+2s+s^2\right)=\frac12\left(2\,id_E+2s\right)=p\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-688ea2985413090b7c7051e611aa92c3_l3.png "Rendered by QuickLaTeX.com")
Autrement dit, est un projecteur et nous savons que :
![\[E=\ker(p-id_E)\oplus\ker(p)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9453a002809338bb6b790b729862cfe1_l3.png "Rendered by QuickLaTeX.com")
Or, il est facile de voir que :
![\[\ker(p-id_E)=\ker(s-id_E)\qquad\text{et}\qquad\ker(p)=\ker(s+id_E)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b9e905a55f9ed67f704d01014b336a84_l3.png "Rendered by QuickLaTeX.com")
J’espère avoir contribué, par cet article, à vous rendre les choses plus claires 🙂
Vos questions ou remarques sont les bienvenues. Vous pouvez laisser un commentaire ci-dessous ou bien passer par le formulaire de contact.