
Lettre C
CANONIQUE (base)
Commençons par un point important, souvent mal compris : étant donné un  espace vectoriel E abstrait, de dimension finie, l’expression base canonique de E n’a AUCUN sens !
espace vectoriel E abstrait, de dimension finie, l’expression base canonique de E n’a AUCUN sens !
En revanche, cette expression est bien définie lorsque  est
est  où bien
où bien ![\mathbb{K}_{n}\left[X\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-32ea0dfa8b6dd19ff6309a8689335b00_l3.png "Rendered by QuickLaTeX.com") (espace des polynômes de degré inférieur où égal
(espace des polynômes de degré inférieur où égal  ou encore
ou encore  (espace des matrices rectangulaires à
(espace des matrices rectangulaires à  lignes et
lignes et  colonnes) :
colonnes) :
La base canonique de  est :
est :
![\[\left(\left(1,0,0,\cdots,0\right),\left(0,1,0,\cdots,0\right),\cdots,\left(0,\cdots,0,0,1\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6dc8bc263782995888183ada97b46508_l3.png "Rendered by QuickLaTeX.com")
est : ![\[ \left(1,X,X^{2},\cdots,X^{n}\right) \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b63584f425a69bb5c8139ad9b56f759d_l3.png "Rendered by QuickLaTeX.com")
est constituée des matrices  (avec
(avec  et
et  définies par :
définies par : ![\[E_{a,b}=\left[\delta_{i,a}\delta_{j,b}\right]_{1\leqslant i\leqslant p,\thinspace1\leqslant j\leqslant q} \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0483ab1e23df6815adbe9bf2803e7bd8_l3.png "Rendered by QuickLaTeX.com")
 est le symbole de Kronecker. Par défaut, ces matrices (appelées « matrices élémentaires ») sont rangées selon l’ordre lexicographique dans
est le symbole de Kronecker. Par défaut, ces matrices (appelées « matrices élémentaires ») sont rangées selon l’ordre lexicographique dans 
Par exemple, la base canonique de
 est généralement donnée ainsi :
est généralement donnée ainsi :
![\[ \left(\left[\begin{array}{ccc} 1 & 0 & 0\\ 0 & 0 & 0 \end{array}\right],\left[\begin{array}{ccc} 0 & 1 & 0\\ 0 & 0 & 0 \end{array}\right],\left[\begin{array}{ccc} 0 & 0 & 1\\ 0 & 0 & 0 \end{array}\right],\left[\begin{array}{ccc} 0 & 0 & 0\\ 1 & 0 & 0 \end{array}\right],\left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & 1 & 0 \end{array}\right],\left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & 0 & 1 \end{array}\right]\right) \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a2fe0228636295404636981bde6f8a43_l3.png "Rendered by QuickLaTeX.com")
![M=\left[m_{i,j}\right]_{1\leqslant i\leqslant p,\thinspace1\leqslant j\leqslant q}\in\mathcal{M}_{p,q}\left(\mathbb{K}\right),](https://math-os.com/wp-content/ql-cache/quicklatex.com-e33b39a25ca7b9780b027d2317e38936_l3.png "Rendered by QuickLaTeX.com") l’application
l’application  représentée par
représentée par  dans les bases canoniques de
dans les bases canoniques de  et
et  est appelée : application linéaire canoniquement associée à
est appelée : application linéaire canoniquement associée à 
CARDINAL
Le cardinal d’un ensemble fini est simplement le nombre d’éléments de .
On le note :  .
.
Par exemple, si  , alors
, alors  .
.
Pour être plus précis, on peut définir cette notion comme suit :
- l’ensemble vide est de cardinal 0
- si
 , un ensemble est dit de cardinal
, un ensemble est dit de cardinal  lorsqu’il est en bijection avec
lorsqu’il est en bijection avec 
La validité de cette définition résulte du fait que si  sont deux entiers naturels non nuls tels que
sont deux entiers naturels non nuls tels que  et sont en bijection, alors
et sont en bijection, alors  .
.
Si  sont deux ensembles finis et disjoints, alors :
sont deux ensembles finis et disjoints, alors :
![\[\text{card}(A\cup B)=\text{card}(A)+\text{card}(B)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-dc4563400b05b5dc0d337232e86373cd_l3.png "Rendered by QuickLaTeX.com")
 , cette formule prend la forme plus générale :
, cette formule prend la forme plus générale :
![\[\text{card}(A\cup B)=\text{card}(A)+\text{card}(B)-\text{card}(A\cap B)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b983785994dd06d9200ce1119c9249be_l3.png "Rendered by QuickLaTeX.com")
On peut encore généraliser … pour obtenir la formule du crible, qui donne le cardinal d’une union finie d’ensembles finis.
La notion de cardinal s’étend aux cas des ensembles infinis, mais cette notion est plus délicate. Disons, sans rentrer dans les détails, que le cardinal d’un ensemble peut être défini comme la classe (propre) des ensembles équipotents à (c’est-à-dire : des ensembles qui sont en bijection avec ).
CAUCHY-SCHWARZ (inégalité de)
Définition
Etant donné un  espace vectoriel
espace vectoriel  on appelle forme bilinéaire symétrique positive (FBSP) sur toute application
on appelle forme bilinéaire symétrique positive (FBSP) sur toute application  telle que, pour tout
telle que, pour tout  :
:

 :
: ![\[\varphi\left(x,y\right)=\varphi\left(y,x\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2859204d8cc07c30f0a6706635a7399a_l3.png "Rendered by QuickLaTeX.com")
On note classiquement  l’application partielle
l’application partielle 
Notation analogue pour 
 désigne l’espace des formes linéaires sur
désigne l’espace des formes linéaires sur 
Théorème (inégalité de Cauchy-Schwarz)
Etant donnés un espace vectoriel et une FBSP sur :
(CS) ![\[\boxed{\forall\left(x,y\right)\in E^{2},\thinspace\varphi\left(x,y\right)^{2}\leqslant\varphi\left(x,x\right)\varphi\left(y,y\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e8a0547e343b9c7cbb0ab73cc6d257fd_l3.png "Rendered by QuickLaTeX.com")
Bien entendu, ce résultat est aussi valable :
- si
 est une forme bilinéaire symétrique négative.
est une forme bilinéaire symétrique négative. - si est un produit scalaire (FBS définie positive).
On peut montrer que les FBS qui satisfont (CS) sont exactement les FBSP et leurs opposées.
Voici trois versions particulières usuelles de (CS) :
Exemple 1
Pour tout  et pour tous
et pour tous  et
et  :
:
![\[\left(\sum_{i=1}^{n}x_{i}y_{i}\right)^{2}\leqslant\left(\sum_{i=1}^{n}x_{i}^{2}\right)\left(\sum_{i=1}^{n}y_{i}^{2}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7ec3b0380dea4c9c71dd755ec30373be_l3.png "Rendered by QuickLaTeX.com")
Exemple 2
Pour tout couple  d’applications continues par morceaux de
d’applications continues par morceaux de ![\left[a,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c1c9b62f4ffe493505d6566104a9b311_l3.png "Rendered by QuickLaTeX.com") dans
dans  :
:
![\[\left(\int_{a}^{b}f\left(t\right)\thinspace g\left(t\right)\thinspace dt\right)^{2}\leqslant\left(\int_{a}^{b}f\left(t\right)^{2}\thinspace dt\right)\left(\int_{a}^{b}g\left(t\right)^{2}\thinspace dt\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5129eb8a7b47d2b6b593d9340b2b8812_l3.png "Rendered by QuickLaTeX.com")
Exemple 3
Si  est un espace probabilisé et si
est un espace probabilisé et si  est un couple de variables aléatoires réelles possédant une variance, alors :
est un couple de variables aléatoires réelles possédant une variance, alors :
![\[\text{cov}\left(X,Y\right)^{2}\leqslant\mathbb{V}\left(X\right)\thinspace\mathbb{V}\left(Y\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-73214e4d5ab73b83cf323993d90eb9f3_l3.png "Rendered by QuickLaTeX.com")
A toute FBSP est associée une semi-norme, définie par :
![\[\forall x\in E,\thinspace\left\Vert x\right\Vert =\sqrt{\varphi\left(x,x\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d20b062f9f41342d683f30458e17f8ca_l3.png "Rendered by QuickLaTeX.com")
Bien sûr, cette semi-norme devient une norme à part entière si est un produit scalaire.
Définition
Etant donné un espace vectoriel on appelle forme bilinéaire symétrique positive (FBSP) sur toute application telle que, pour tout :
:
On note classiquement l’application partielle
Notation analogue pour
désigne l’espace des formes linéaires sur
Théorème (inégalité de Cauchy-Schwarz)
Etant donnés un espace vectoriel et une FBSP sur :
(CS)
Bien entendu, ce résultat est aussi valable :
- si est une forme bilinéaire symétrique négative.
- si est un produit scalaire (FBS définie positive).
On peut montrer que les FBS qui satisfont (CS) sont exactement les FBSP et leurs opposées.
Voici trois versions particulières usuelles de (CS) :
Exemple 1
Pour tout et pour tous et :
Exemple 2
Pour tout couple d’applications continues par morceaux de dans :
Exemple 3
Si est un espace probabilisé et si est un couple de variables aléatoires réelles possédant une variance, alors :
A toute FBSP est associée une semi-norme, définie par :
Bien sûr, cette semi-norme devient une norme à part entière si est un produit scalaire.
Remarque
Dans le cas particulier d’un espace préhilbertien réel (espace vectoriel réel muni d’un produit scalaire), on peut ajouter :
- que le cas d’égalité dans l’inégalité (CS) est celui ou la famille
 est liée,
est liée, - que (CS) entraîne la continuité du produit scalaire. En conséquence, si
 est une partie quelconque de son orthogonal est fermé (comme intersection d’une famille d’hyperplans fermés).
est une partie quelconque de son orthogonal est fermé (comme intersection d’une famille d’hyperplans fermés).
CESÀRO (lemme de)
Lemme de Cesàro discret
Si une suite réelle  possède une limite (finie ou infinie), alors la suite de terme général
possède une limite (finie ou infinie), alors la suite de terme général
![\[M_{n}=\frac{1}{n+1}\sum_{k=0}^{n}x_{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f4cacb4170154a3750b999c34989e858_l3.png "Rendered by QuickLaTeX.com")
On montre ce résultat en revenant à la définition de la convergence (ou de la divergence vers l’infini) d’une suite réelle. Une preuve détaillée est disponible dans cet article.
Sa réciproque est fausse, comme on peut le voir avec la suite de terme général  En effet, la suite
En effet, la suite  converge vers 0, mais la suite diverge.
converge vers 0, mais la suite diverge.
On dispose toutefois d’une réciproque partielle :
Si la suite converge et si la suite est monotone, alors la suite converge aussi (et les limites sont fatalement égales). Davantage de détails à lire ici.
Le théorème de sommation des équivalents apporte une généralisation au lemme de Cesàro :
Si les suites à termes positifs et  sont équivalentes, alors les séries
sont équivalentes, alors les séries  et
et  sont de même nature; en outre :
sont de même nature; en outre :
- En cas de convergence :
![\[\sum_{k=n}^{\infty}x_{k}\sim\sum_{k=n}^{\infty}y_{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ddd72dd31c3e72def78f84605a7ea528_l3.png "Rendered by QuickLaTeX.com")
- En cas de divergence :
![\[\sum_{k=0}^{n}x_{k}\sim\sum_{k=0}^{n}y_{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7a881b3318d827deaab7ac9610319133_l3.png "Rendered by QuickLaTeX.com")
En supposant la convergence de la suite vers une limite  et en choisissant
et en choisissant  on retrouve le lemme de Cesàro énoncé au début.
on retrouve le lemme de Cesàro énoncé au début.
Signalons aussi le :
Lemme de Cesàro, version continue
Etant donnée une application continue  si
si  admet en
admet en  une limite
une limite  (finie ou non) alors :
(finie ou non) alors :
Là encore, la réciproque est fausse. Par exemple :

mais la fonction cosinus ne possède pas de limite en 
Un article dédié à l’histoire du lemme de Cesàro est consultable ici.
COMMUTATIVITÉ
Une opération  définie sur un ensemble est dite commutative lorsque
définie sur un ensemble est dite commutative lorsque
![\[\forall\left(x,y\right)\in E^2,\,x\star y=y\star x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b86105ffbee5ee36cd7fd961d8399da2_l3.png "Rendered by QuickLaTeX.com")
Par exemple, sont commutatives les opérations suivantes :
- addition et multiplication dans

- union et intersection dans
 (ensemble des parties de )
(ensemble des parties de ) - pgcd et ppcm dans

En revanche, les opérations ci-dessous ne sont pas commutatives :
- soustraction dans
- division dans

En effet :  et
et 
Un groupe dont l’opération est commutative est dit abélien.
COMPACT
Un espace topologique  est dit compact s’il est séparé (pour tout couple de points distincts de
est dit compact s’il est séparé (pour tout couple de points distincts de  on peut trouver deux ouverts
on peut trouver deux ouverts  disjoints, tels que
disjoints, tels que  et
et  ) et si l’on peut extraire de tout recouvrement ouvert de un sous-recouvrement fini.
) et si l’on peut extraire de tout recouvrement ouvert de un sous-recouvrement fini.
Cette dernière condition signifie que pour toute famille  d’ouverts vérifiant
d’ouverts vérifiant  il existe
il existe  tel que
tel que  est fini et
est fini et 
On peut montrer que, pour un espace métrique (et, en particulier pour un espace vectoriel normé), cette définition équivaut à la suivante (appelée compacité séquentielle) : de toute suite à termes dans on peut extraire une sous-suite convergente.
Etant donné d’un espace métrique :
- toute partie compacte de est fermée.
- si est compact, alors toute partie fermée de est compacte.
- si
 est une suite décroissante de parties compactes non vides, alors
est une suite décroissante de parties compactes non vides, alors 
Etant donnés deux espaces métriques  :
:
- si
 est une partie compacte de et si est une partie compacte de
est une partie compacte de et si est une partie compacte de  alors
alors  est une partie compacte de
est une partie compacte de 
- si est compact et si
 est continue, alors
est continue, alors  est une partie compacte de
est une partie compacte de  (énoncé
(énoncé  ).
).
Dans un espace vectoriel normé de dimension finie, les parties compactes sont celles qui sont fermées et bornées.
Cas particulier de l’énoncé : toute application continue d’un métrique compact dans est bornée et atteint ses bornes. Ceci généralise le théorème selon lequel toute application continue ![\left[a,b\right]\rightarrow\mathbb{R}](https://math-os.com/wp-content/ql-cache/quicklatex.com-01bf3ed83ceaa2c5bcccd02beca4cecb_l3.png "Rendered by QuickLaTeX.com") est bornée et atteint ses bornes (en effet : un segment est une partie fermée et bornée de
est bornée et atteint ses bornes (en effet : un segment est une partie fermée et bornée de  , donc un espace compact).
, donc un espace compact).
Exemple 1
Etant donné un evn notons  sa boule unité fermée et
sa boule unité fermée et  sa sphère unité. Alors la compacité de et celle de sont équivalentes. En effet, si la sphère est compacte, alors comme l’application :
sa sphère unité. Alors la compacité de et celle de sont équivalentes. En effet, si la sphère est compacte, alors comme l’application :
![\[f:\left[0,1\right]\times S\rightarrow E,\left(t,x\right)\mapsto tx\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-920196d8796685e1c0eb137f4b7186f8_l3.png "Rendered by QuickLaTeX.com")
![\left[0,1\right]\times S](https://math-os.com/wp-content/ql-cache/quicklatex.com-d011951367774efa42dc9e375084c212_l3.png "Rendered by QuickLaTeX.com") en qui est donc aussi compact. Réciproquement, si la boule est compacte, alors est compact en tant que partie fermée d’un compact.
en qui est donc aussi compact. Réciproquement, si la boule est compacte, alors est compact en tant que partie fermée d’un compact.
Exemple 2
Dans  étant donné un triangle
étant donné un triangle  (enveloppe convexe de trois points
(enveloppe convexe de trois points  non alignés), il existe un point
non alignés), il existe un point  en lequel le produit
en lequel le produit  est maximum. Il suffit de voir que est compact (fermé et borné) et que l’application :
est maximum. Il suffit de voir que est compact (fermé et borné) et que l’application :
![\[T\rightarrow\mathbb{R},\thinspace M\mapsto MA\cdot MB\cdot MC\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-33d9d72eb6aac88a9b950dd458d3ddc7_l3.png "Rendered by QuickLaTeX.com")
Un espace topologique est dit compact s’il est séparé (pour tout couple de points distincts de on peut trouver deux ouverts disjoints, tels que et ) et si l’on peut extraire de tout recouvrement ouvert de un sous-recouvrement fini.
Cette dernière condition signifie que pour toute famille d’ouverts vérifiant il existe tel que est fini et
On peut montrer que, pour un espace métrique (et, en particulier pour un espace vectoriel normé), cette définition équivaut à la suivante (appelée compacité séquentielle) : de toute suite à termes dans on peut extraire une sous-suite convergente.
Etant donné d’un espace métrique :
- toute partie compacte de est fermée.
- si est compact, alors toute partie fermée de est compacte.
- si est une suite décroissante de parties compactes non vides, alors
Etant donnés deux espaces métriques :
- si est une partie compacte de et si est une partie compacte de alors est une partie compacte de
- si est compact et si est continue, alors est une partie compacte de (énoncé ).
Dans un espace vectoriel normé de dimension finie, les parties compactes sont celles qui sont fermées et bornées.
Cas particulier de l’énoncé : toute application continue d’un métrique compact dans est bornée et atteint ses bornes. Ceci généralise le théorème selon lequel toute application continue est bornée et atteint ses bornes (en effet : un segment est une partie fermée et bornée de , donc un espace compact).
Exemple 1
Etant donné un evn notons sa boule unité fermée et sa sphère unité. Alors la compacité de et celle de sont équivalentes. En effet, si la sphère est compacte, alors comme l’application :
en qui est donc aussi compact. Réciproquement, si la boule est compacte, alors est compact en tant que partie fermée d’un compact.
Exemple 2
Dans étant donné un triangle (enveloppe convexe de trois points non alignés), il existe un point en lequel le produit est maximum. Il suffit de voir que est compact (fermé et borné) et que l’application :
Exemple 3
Soit est un evn et soient deux parties de .
Si est fermé et si est compact, alors  est fermé. En effet, étant donnée une suite convergente
est fermé. En effet, étant donnée une suite convergente  à termes dans
à termes dans  on peut poser, pour tout :
on peut poser, pour tout :  avec
avec  et
et  Comme est compact, la suite
Comme est compact, la suite  possède une suite extraite
possède une suite extraite  qui converge vers un vecteur
qui converge vers un vecteur 
La suite  est alors convergente (différence de deux suites convergentes) et, en notant
est alors convergente (différence de deux suites convergentes) et, en notant  sa limite :
sa limite :  car est fermé. En notant
car est fermé. En notant  la limite de
la limite de  qui est aussi celle de
qui est aussi celle de  on voit que :
on voit que : 
COMPOSITION (loi o)
Etant donnés trois ensembles et deux applications  et
et  , on note
, on note  l’application
l’application
![\[\boxed{A\to C,x\mapsto g\left(f(x)\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-37fd6794ee1c61155f567f19af217753_l3.png "Rendered by QuickLaTeX.com")
On dit que est la composée de par  .
.
On peut étendre la définition au cas où  avec
avec  . Cette condition garantit en effet que l’on peut appliquer à
. Cette condition garantit en effet que l’on peut appliquer à  , pour tout
, pour tout  .
.
Exemple
Si et sont les applications suivantes :
![\[f:\mathbb{N}\to\mathbb{Q}^2,n\mapsto\left(\frac{1}{n+1},\frac{2}{n+2}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-662ebd7304bbdd8d89c924aee38887e9_l3.png "Rendered by QuickLaTeX.com")
![\[g:\mathbb{R}^2\to\mathbb{R},(x,y)\mapsto x+2y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-572830647217047f6c369a5e9f574ded_l3.png "Rendered by QuickLaTeX.com")
est définie par : ![\[g\circ f:\mathbb{N}\to\mathbb{R},n\mapsto\frac{1}{n+1}+\frac{4}{n+2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d8547b8f3385ceb3081fbae5b0c301fc_l3.png "Rendered by QuickLaTeX.com")
Une propriété à la fois simple et fondamentale de la composition des applications est son associativité. Cela signifie que s’il est possible de composer par et par  , alors
, alors
![\[\left(f\circ g\right)\circ h=f\circ\left(g\circ h\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f261be0a395f6a41075bf2db92c10c01_l3.png "Rendered by QuickLaTeX.com")
Signalons pour finir que si  sont deux applications d’un ensemble dans lui-même, alors il se peut que
sont deux applications d’un ensemble dans lui-même, alors il se peut que  (mais ce n’est pas vrai en général).
(mais ce n’est pas vrai en général).
On dit alors que  et
et  commutent.
commutent.
Etant donnés trois ensembles et deux applications et , on note l’application
On dit que est la composée de par .
On peut étendre la définition au cas où avec . Cette condition garantit en effet que l’on peut appliquer à , pour tout .
Exemple
Si et sont les applications suivantes :
est définie par :
Une propriété à la fois simple et fondamentale de la composition des applications est son associativité. Cela signifie que s’il est possible de composer par et par , alors
Signalons pour finir que si sont deux applications d’un ensemble dans lui-même, alors il se peut que (mais ce n’est pas vrai en général).
On dit alors que et commutent.
Exemple
Si  , alors les polynômes de Tchebytchev de première espèce
, alors les polynômes de Tchebytchev de première espèce  et
et  commutent. En effet, pour tout
commutent. En effet, pour tout  :
:

Ceci prouve que les polynômes  et
et  sont égaux puisqu’ils coïncident sur l’ensemble
sont égaux puisqu’ils coïncident sur l’ensemble ![[-1,1]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ab55916b5d2bb2069c506daf7109ed26_l3.png "Rendered by QuickLaTeX.com") qui est infini.
qui est infini.
CONVERGENCE (d’une suite)
Une suite réelle est dite convergente lorsqu’il existe un réel tel que :
![\[\begin{array}{c}\forall\epsilon>0,\thinspace\exists N\in\mathbb{N};\thinspace\forall n\in\mathbb{N}\\n\geqslant N\Rightarrow\left|u_{n}-L\right|\leqslant\epsilon\end{array}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-92b55d0d30ad3e5143bd906cc9c302e8_l3.png "Rendered by QuickLaTeX.com")
 ème terme de la suite et peut être rendu arbitrairement petit (plus petit que n’importe quel
ème terme de la suite et peut être rendu arbitrairement petit (plus petit que n’importe quel  à condition que l’indice soit assez grand.
à condition que l’indice soit assez grand.
Le réel est alors unique. C’est la limite de  notée
notée  ou bien
ou bien 
Une suite non convergente est dite divergente.
Tout ce qui précède se généralise sans aucune difficulté à un espace vectoriel normé, en remplaçant valeur absolue par norme …
Exemple 1
La suite de terme général :
![\[\boxed{u_{n}=\frac{2n+\left(-1\right)^{n}}{n+1}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-99de6548a46273c57787a3e0eb08f5cf_l3.png "Rendered by QuickLaTeX.com")
 En effet, pour tout
En effet, pour tout  :
: 
![\[\left|u_{n}-2\right|\leqslant\frac{3}{n+1}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-65982708b50771bd0212fc17709a4863_l3.png "Rendered by QuickLaTeX.com")
Etant donné  posons :
posons :
![\[N=\max\left\{ \left\lceil \frac{3}{\epsilon}\right\rceil -1,0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0ab42e35736180cffbd63167c21ba797_l3.png "Rendered by QuickLaTeX.com")
Alors et la condition  entraîne
entraîne 
Exemple 2
La suite de terme général :
![\[\boxed{u_{n}=\left(-1\right)^{n}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8e74e10a2abec1ce402fe63bb9da29b3_l3.png "Rendered by QuickLaTeX.com")
En effet, supposons le contraire, notons sa limite et fixons un réel ![\epsilon\in\left]0,1\right[.](https://math-os.com/wp-content/ql-cache/quicklatex.com-d4bb7355220871ae804fb70df25c4fd1_l3.png "Rendered by QuickLaTeX.com")
Il existerait  tel que :
tel que :
![\[\forall n\geqslant N,\thinspace\left|\left(-1\right)^{n}-L\right|\leqslant\epsilon\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b8fe12f2b119bf493b7a2ce72bbe7b3a_l3.png "Rendered by QuickLaTeX.com")
pair tel que  que :
que : ![\[\left|1-L\right|\leqslant\epsilon\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-60256b3ea62f8a0262a28f342876f047_l3.png "Rendered by QuickLaTeX.com")
impair tel que que : ![\[\left|1+L\right|\leqslant\epsilon\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-459318225c3722bb0564db7cac126590_l3.png "Rendered by QuickLaTeX.com")

➡ On peut montrer que toute suite réelle convergente est bornée. Cet exemple montre que la réciproque est fausse.
Exemple 3
La suite de terme général :
![\[\boxed{u_{n}=\left\{ \begin{array}{cc}2^{-n} & \text{si }n\text{ est pair}\\0 & \text{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8c3876a3bfce895b0b9d087d1083c12a_l3.png "Rendered by QuickLaTeX.com")
 En effet, pour tout :
En effet, pour tout : 
on aura  dès que
dès que 
L’inégalité équivaut à  qui se prouve aisément par récurrence.
qui se prouve aisément par récurrence.
➡ Cet exemple montre qu’une suite peut converger, sans être monotone (et même : en n’étant monotone à partir d’aucun rang). Cependant :
Théorème (limite monotone)
Toute suite réelle, croissante et majorée (ou décroissante et minorée) converge.
Toutes les opérations raisonnables entre suites réelles convergentes produisent de nouvelles suites convergentes. Notamment :
- la somme de deux suites convergentes converge vers la somme de leurs limites.
- le produit de deux suites convergentes converge vers le produit de leurs limites.
- si converge vers
 alors il existe tel que
alors il existe tel que  pour tout et, de plus, la suite
pour tout et, de plus, la suite  converge vers
converge vers 
- si converge vers alors la suite de terme général :
converge aussi vers![\[ x_{n}=\frac{1}{n}\left(u_{0}+\cdots+u_{n-1}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fcde1ca5f0492b8c5b50b223c6880280_l3.png "Rendered by QuickLaTeX.com") (c’est le lemme de Cesàro).
(c’est le lemme de Cesàro).
On dit que la suite réelle est de Cauchy lorsque :
![\[\begin{array}{c}\forall\epsilon>0,\thinspace\exists N\in\mathbb{N},\thinspace\forall\left(p,q\right)\in\mathbb{N}^{2}\\\left(p\geqslant N\text{ et }q\geqslant N\right)\Rightarrow\left|u_{p}-u_{q}\right|\leqslant\epsilon\end{array}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4e8e404246b51f7e0dbb909151cc38cf_l3.png "Rendered by QuickLaTeX.com")
CONVEXE (fonction)
Soit  un intervalle non trivial. Une application
un intervalle non trivial. Une application  est dite convexe lorsque :
est dite convexe lorsque :
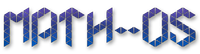
![\[\begin{array}{c}\forall\left(a,b\right)\in I^{2},\thinspace\forall t\in\left[0,1\right],\\f\left(\left(1-t\right)a+tb\right)\leqslant\left(1-t\right)\thinspace f\left(a\right)+t\thinspace f\left(b\right)\end{array}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4fa02d2350f73bae132f103eae436208_l3.png "Rendered by QuickLaTeX.com")
limitée par les points d’abscisses  et
et  est en dessous de la corde (= segment joignant ces deux points).
est en dessous de la corde (= segment joignant ces deux points).
On dit que est concave lorsque  est convexe, ce qui revient à renverser l’inégalité de définition.
est convexe, ce qui revient à renverser l’inégalité de définition.
Les applications affines sont, si l’on peut dire, à l’interface entre l’ensemble des applications convexes et celui des applications concaves (elles en forment l’intersection).
On peut montrer que si est convexe, alors est continue en tout point intérieur à  Mieux, est en fait dérivable à gauche et à droite en un tel point.
Mieux, est en fait dérivable à gauche et à droite en un tel point.
Si est dérivable, alors :
![\[\boxed{f\text{ convexe}\Leftrightarrow f'\text{ croissante}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-48b977cde57e717c43da4d054b4cdc87_l3.png "Rendered by QuickLaTeX.com")
est deux fois dérivable, alors : ![\[\boxed{f\text{ convexe}\Leftrightarrow f''\geqslant0}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d8363581c2d2b95b669fcf32d7974b12_l3.png "Rendered by QuickLaTeX.com")
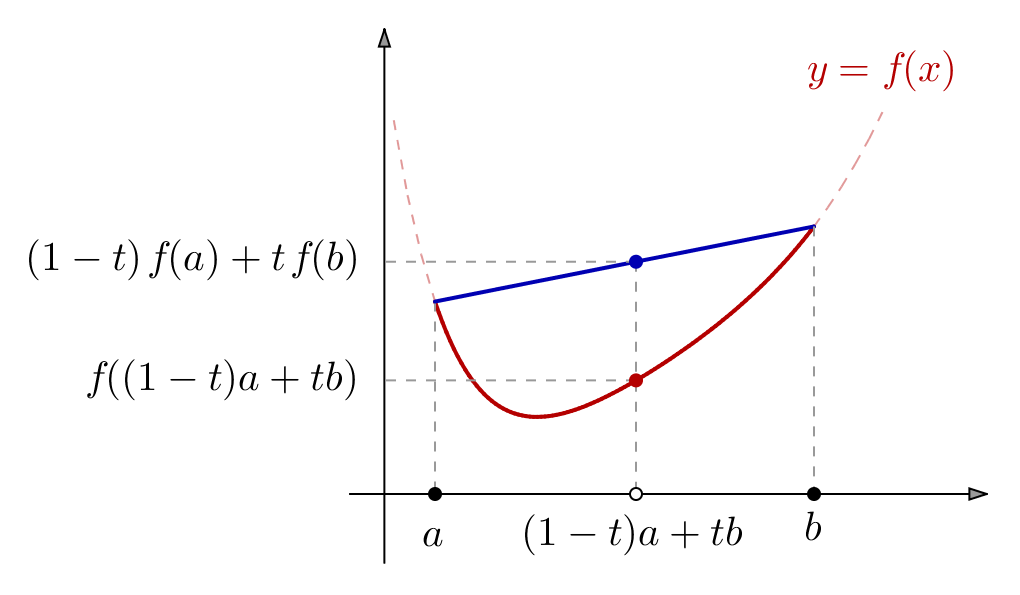
 s’annule et change de signe en
s’annule et change de signe en  alors son graphe
alors son graphe  traverse localement sa tangente. On dit que présente une inflexion en
traverse localement sa tangente. On dit que présente une inflexion en  L’illustration ci-dessous montre quelques points d’inflexion et la tangente en l’un d’eux.
L’illustration ci-dessous montre quelques points d’inflexion et la tangente en l’un d’eux.
Exemples
Les applications  pour ainsi que
pour ainsi que  pour
pour  sont convexes.
sont convexes.
Le logarithme népérien est concave sur ![\left]0,+\infty\right[.](https://math-os.com/wp-content/ql-cache/quicklatex.com-efeb3c1fa9cce64a033b154c182e29fe_l3.png "Rendered by QuickLaTeX.com")
Pour tout  , l’application
, l’application  est convexe sur chaque
est convexe sur chaque ![\left[\left(2n-1\right)\pi,2n\pi\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6a6fe555078f54c7a2ae67c808f22da0_l3.png "Rendered by QuickLaTeX.com") et concave sur chaque
et concave sur chaque ![\left[2n\pi,\left(2n+1\right)\pi\right].](https://math-os.com/wp-content/ql-cache/quicklatex.com-bcb0d01646e8face33d504b364aeec9a_l3.png "Rendered by QuickLaTeX.com")
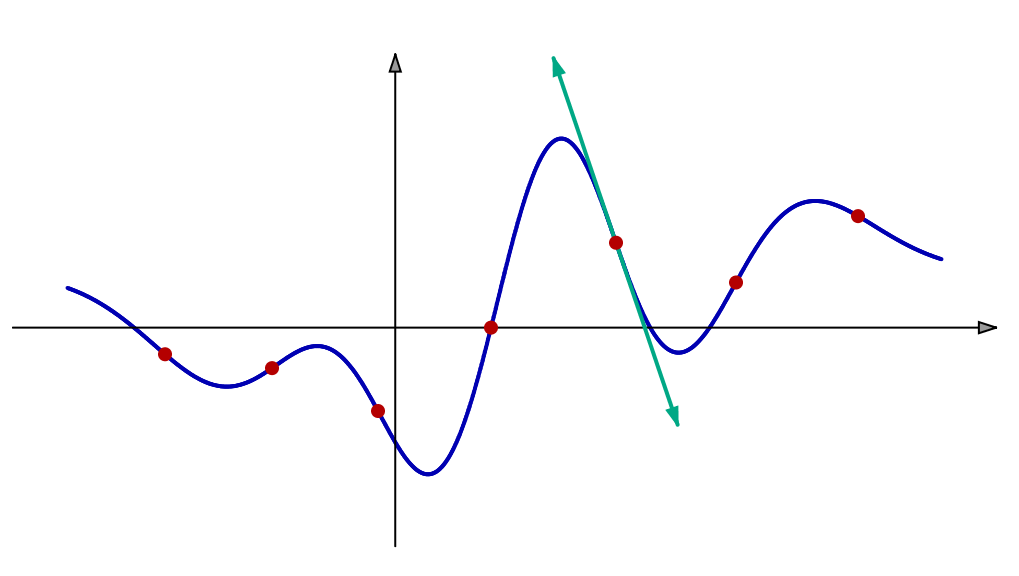
Si est dérivable est convexe, alors :
![\[\boxed{\forall\left(a,x\right)\in I^{2},\thinspace f\left(x\right)\geqslant f'\left(a\right)\left(x-a\right)+f\left(a\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ae800aee55b862116a1851a57efb7fd8_l3.png "Rendered by QuickLaTeX.com")
est situé au-dessus de chacune de ses tangentes. Pour concave, cette inégalité est renversée.
Comme l’exponentielle est convexe, alors :
![\[\forall x\in\mathbb{R},\thinspace e^{x}\geqslant1+x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-684882a36852a841d903b0d2305af594_l3.png "Rendered by QuickLaTeX.com")
![\left[0,\pi\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-56e7ca83b44ec07fdd0ba9fe2534ef7f_l3.png "Rendered by QuickLaTeX.com") :
: ![\[ \forall x\in\left[0,\pi\right],\thinspace\sin\left(x\right)\leqslant x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-56a809f83fbc0f3fb34de0f9a9e19d0a_l3.png "Rendered by QuickLaTeX.com")
 ).
).
Soit un intervalle non trivial. Une application est dite convexe lorsque :
limitée par les points d’abscisses et est en dessous de la corde (= segment joignant ces deux points).
On dit que est concave lorsque est convexe, ce qui revient à renverser l’inégalité de définition.
Les applications affines sont, si l’on peut dire, à l’interface entre l’ensemble des applications convexes et celui des applications concaves (elles en forment l’intersection).
On peut montrer que si est convexe, alors est continue en tout point intérieur à Mieux, est en fait dérivable à gauche et à droite en un tel point.
Si est dérivable, alors :
est deux fois dérivable, alors :
s’annule et change de signe en alors son graphe traverse localement sa tangente. On dit que présente une inflexion en L’illustration ci-dessous montre quelques points d’inflexion et la tangente en l’un d’eux.
Exemples
Les applications pour ainsi que pour sont convexes.
Le logarithme népérien est concave sur
Pour tout , l’application est convexe sur chaque et concave sur chaque
Si est dérivable est convexe, alors :
est situé au-dessus de chacune de ses tangentes. Pour concave, cette inégalité est renversée.
Comme l’exponentielle est convexe, alors :
:
).
Pour aller plus loin …
La notion d’application convexe se généralise.
Soit un espace vectoriel et une partie convexe de Une application  est dite convexe lorsque :
est dite convexe lorsque :
![\[\begin{array}{c}\forall\left(a,b\right)\in A^{2},\thinspace\forall t\in\left[0,1\right]\\u\left(\left(1-t\right)a+tb\right)\leqslant\left(1-t\right)\thinspace u\left(a\right)+t\thinspace u\left(b\right)\end{array}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7bcbda00c4b90a8e73b10675e3910184_l3.png "Rendered by QuickLaTeX.com")
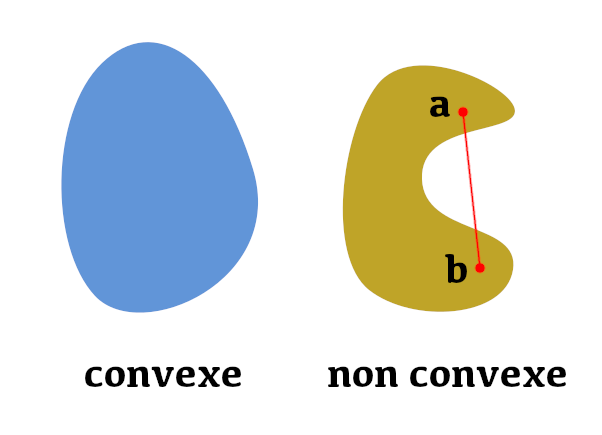
CONVEXE (partie)
Etant donné un espace vectoriel une partie de est dite convexe lorsque :
![\[\boxed{\begin{array}{c}\forall\left(a,b\right)\in A^{2},\thinspace\forall t\in\left[0,1\right]\\\left(1-t\right)a+tb\in A\end{array}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c5852b6ec8b8789e2b61e6e7a1f9f540_l3.png "Rendered by QuickLaTeX.com")
et est inclus dans dès que et appartiennent à 
Par définition, le segment joignant deux vecteurs  est l’ensemble
est l’ensemble
![\[\left[a,b\right]=\left\{ \left(1-t\right)a+tb;\thinspace t\in\left[0,1\right]\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9671dd6eab848e0b4594f6445ad29d2f_l3.png "Rendered by QuickLaTeX.com")
Les parties convexes de sont les intervalles.
Tout sous espace affine (et, en particulier, tout sous-espace vectoriel) de est convexe, de même que l’image directe ou réciproque d’une partie convexe par une application affine.
L’intersection d’une famille quelconque de parties convexes de est encore convexe. Ceci permet d’ailleurs de définir l’enveloppe convexe d’une partie quelconque de comme l’intersection de la famille des parties convexes qui contiennent 
➡ On suppose maintenant que est muni d’une norme.
- Toute boule (ouverte ou fermée), pour une quelconque norme sur est une partie convexe (ceci généralise ce qui a été dit plus haut au sujet des intervalles de

- L’adhérence et l’intérieur d’une partie convexe sont encore convexes.
- La distance à une partie non vide est définie par :
Si![\[E\rightarrow\mathbb{R}^{+},\thinspace x\mapsto d_{A}\left(x\right)=\inf\left\{ \left\Vert x-a\right\Vert ;\thinspace a\in A\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bfc5f076a9b7caee3f263d232a162dde_l3.png "Rendered by QuickLaTeX.com") est convexe, alors l’application
est convexe, alors l’application  est convexe.
est convexe.
CORPS
Un corps est un anneau commutatif non nul, dont les éléments non nuls sont tous inversibles.
Autrement dit, un corps est un triplet  où
où  est un ensemble comportant au moins deux éléments, muni de deux opérations
est un ensemble comportant au moins deux éléments, muni de deux opérations  et
et  vérifiant les conditions suivantes :
vérifiant les conditions suivantes :
 est un groupe (donc l’élément neutre est noté 0)
est un groupe (donc l’élément neutre est noté 0)- est associative, commutative et distributive sur
- il existe un élément neutre pour , noté 1
- tout élément de
 est inversible pour
est inversible pour
Les exemples les plus courants de corps sont :
- le corps
 des nombres rationnels
des nombres rationnels - le corps des nombres réels
- le corps
 des nombres complexes
des nombres complexes
Tout corps est un anneau intègre, mais la réciproque est fausse. Par exemple  est un anneau intègre, mais ses seuls éléments inversibles sont -1 et 1. Cependant, tout anneau intègre fini est un corps.
est un anneau intègre, mais ses seuls éléments inversibles sont -1 et 1. Cependant, tout anneau intègre fini est un corps.
Etant donné un entier  l’anneau quotient
l’anneau quotient  est un corps lorsque est un nombre premier.
est un corps lorsque est un nombre premier.
Le cardinal d’un corps fini est de la forme  où est premier et
où est premier et  Réciproquement, pour tout nombre premier et pour tout entier
Réciproquement, pour tout nombre premier et pour tout entier  il existe un corps de cardinal et deux tels corps sont isomorphes.
il existe un corps de cardinal et deux tels corps sont isomorphes.
La caractéristique d’un corps est l’unique entier tel que  soit le noyau de l’unique morphisme d’anneaux
soit le noyau de l’unique morphisme d’anneaux  Cet entier est 0 ou bien un nombre premier.
Cet entier est 0 ou bien un nombre premier.
Les seuls idéaux d’un corps sont l’idéal nul et  Réciproquement, si les seuls idéaux d’un anneau commutatif (non nul) sont
Réciproquement, si les seuls idéaux d’un anneau commutatif (non nul) sont  et
et  alors est un corps.
alors est un corps.
Tout anneau intègre peut être plongé dans un corps, appelé son corps de fractions. Le corps des fractions de est  Le corps des fractions de l’anneau
Le corps des fractions de l’anneau ![\mathbb{K}\left[X\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-df93be377a36375414a904d2b1b50708_l3.png "Rendered by QuickLaTeX.com") des polynômes à coefficients dans est le corps
des polynômes à coefficients dans est le corps  des fractions rationnelles.
des fractions rationnelles.
Etant donnés un corps  un sous-corps de
un sous-corps de  et une partie de on note
et une partie de on note  le sous-corps de engendré par
le sous-corps de engendré par  Par exemple :
Par exemple : 
Le sous-anneau de engendré par et est noté ![\mathbb{K}\left[A\right].](https://math-os.com/wp-content/ql-cache/quicklatex.com-fc56626e76de3028871d93c6f8b7fe6c_l3.png "Rendered by QuickLaTeX.com") Par exemple :
Par exemple : ![\mathbb{Z}\left[i\right]=\left\{ a+bi;\thinspace\left(a,b\right)\in\mathbb{Z}^{2}\right\}](https://math-os.com/wp-content/ql-cache/quicklatex.com-b1b5bfb77ed84d92ed9b34aedbfad6d7_l3.png "Rendered by QuickLaTeX.com") est l’anneau des entiers de Gauss.
est l’anneau des entiers de Gauss.
CROISSANCES COMPAREES
En gros, la propriété dite des « croissances comparées » exprime la domination, à l’infini, de la fonction exponentielle sur toute fonction puissance (d’exposant fixe !).
De manière précise, il s’agit du résultat suivant :
Proposition
Pour tout  :
:
![\[\lim_{x\rightarrow+\infty}x^{a}\thinspace e^{-x}=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9e7553d65a6a3675cffd978b3f6c02ad_l3.png "Rendered by QuickLaTeX.com")
Si l’on suppose connu le fait que :
() ![\[\lim_{x\rightarrow+\infty}\dfrac{\ln\left(x\right)}{x}=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bef0b34784b728235fd3be0b87390b2b_l3.png "Rendered by QuickLaTeX.com")
 :
: 
 il vient :
il vient : ![\[\lim_{x\rightarrow+\infty}\ln\left(x^{a}e^{-x}\right)=-\infty\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-efc9b71e6813aa4a2a1513a23a1a711f_l3.png "Rendered by QuickLaTeX.com")
Avec un ordinateur, il convient d’être prudent lorsqu’on trace le graphe de  pour un exposant « assez grand » .
pour un exposant « assez grand » .
Par exemple, voici ce qu’on obtient pour  et un tracé sur l’intervalle
et un tracé sur l’intervalle ![\left[0,10\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-902e53230491aebd48464db2b3866c6a_l3.png "Rendered by QuickLaTeX.com") :
:
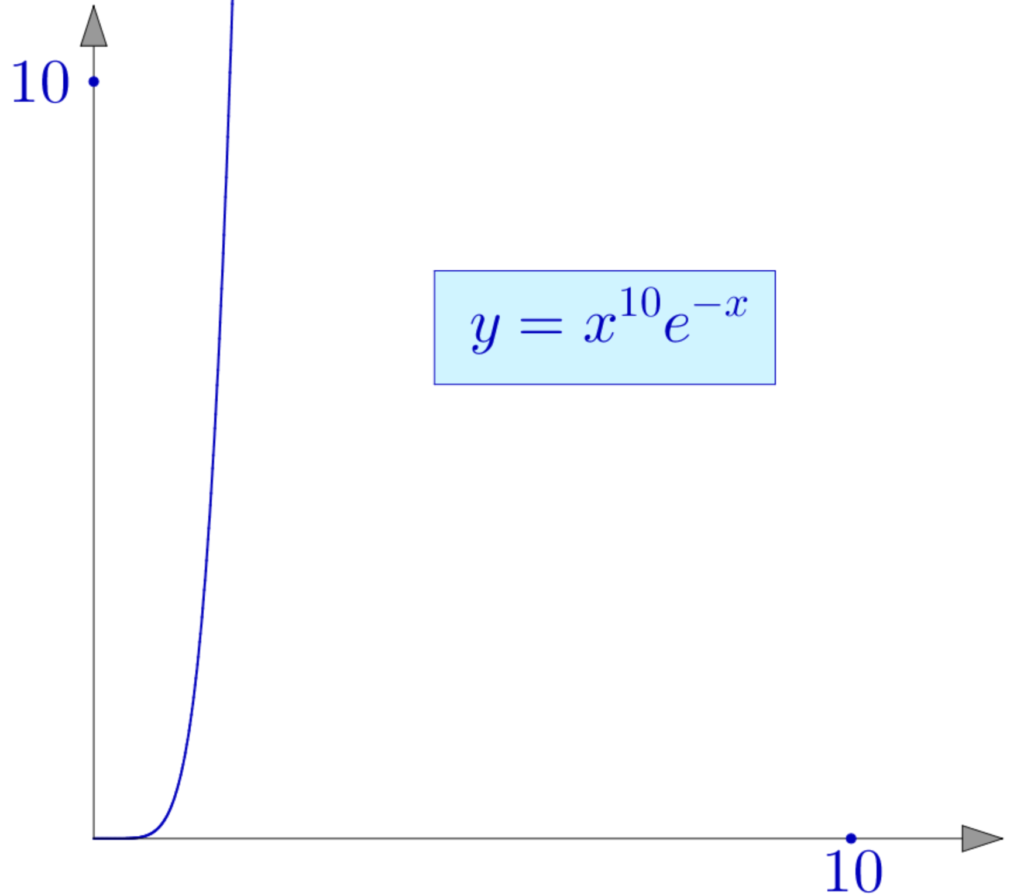
On n’a pas l’impression de voir le graphe d’une fonction qui tend vers 0 en l’infini … ce qui est pourtant le cas ! Mais voici ce que donne le tracé de la même fonction sur ![\left[0,25\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9021e09f43e729c1490bea58c43c164b_l3.png "Rendered by QuickLaTeX.com") :
:
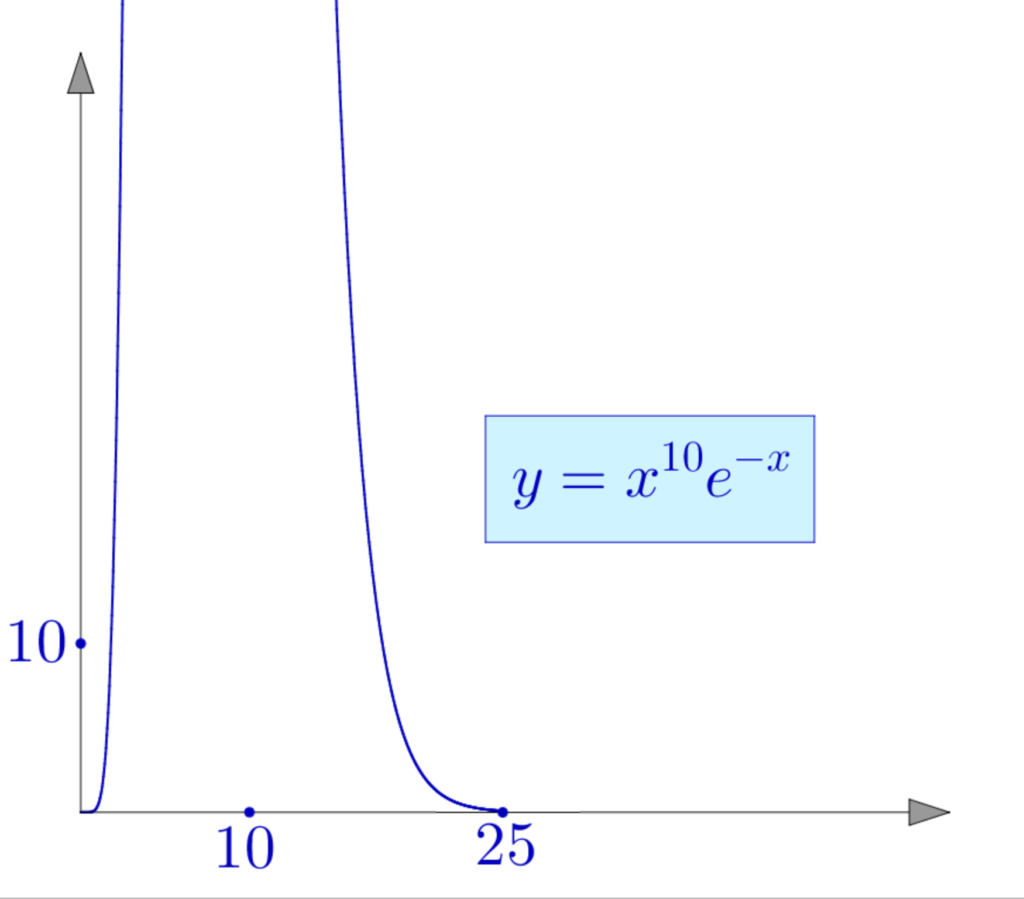
Cette fois, le dessin correspond mieux à ce qu’on attend. Et il ne faut pas s’étonner, sur ce second dessin, de ne pas voir le maximum : il ne peut pas être visible à cette échelle ! En effet la dérivée de  est
est  et le maximum est donc atteint pour
et le maximum est donc atteint pour  Il vaut
Il vaut 