
Certaines notions figurant au programme de première année de CPGE scientifique ou de licence de mathématiques s’avèrent moins faciles à assimiler que d’autres. Si l’on dressait une liste des 10 concepts qui posent le plus de difficultés aux étudiants, je peux dire par expérience que la notion d’image directe ou d’image réciproque y figurerait en bonne place.
L’objet de cette note est de contribuer à éclaircir un peu cette question et d’en montrer quelques unes des principales utilisations, à ce niveau.
Pré-requis :
- Notion d’application,
- Image d’un élément de l’ensemble de départ,
- Antécédents éventuels d’un élément de l’ensemble d’arrivée.
Pour réviser ces notions fondamentales, vous pouvez consultez les deux vidéos suivantes :
Correspondances, Fonctions, Applications – Partie 1
Correspondances, Fonctions, Applications – Partie 2
1 – Image directe : définition et premiers exemples
Considérons une application  et une partie (= un sous-ensemble)
et une partie (= un sous-ensemble)  de
de  .
.
On appelle image directe de par  l’ensemble :
l’ensemble :
![\[\fcolorbox{black}{myBlue}{$f\left\langle A\right\rangle =\left\{ y\in Y;\thinspace\exists x\in A,\thinspace f\left(x\right)=y\right\}$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-933163a46eb6d0e990812e2007439e28_l3.png "Rendered by QuickLaTeX.com")
 est donc l’ensemble des éléments de
est donc l’ensemble des éléments de  qui sont l’image d’un élément de .
qui sont l’image d’un élément de .
Reformulons …
est l’ensemble des éléments de possédant un antécédent dans .
On peut écrire tout aussi bien :
![\[\fcolorbox{black}{myBlue}{$f\left\langle A\right\rangle =\left\{ f\left(x\right);\thinspace x\in A\right\}$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d0309db46e7cbb9c94da04f708e3c72c_l3.png "Rendered by QuickLaTeX.com")
est l’ensemble des images par des éléments de . »
Si ce qui précède n’est pas parfaitement limpide, les exemples qui suivent peuvent aider…
Exemple 1
On commence, c’est incontournable, par un exemple avec des « patates » 🙂

Si l’on note l’application représentée par le diagramme ci-contre et  ses ensembles de départ et d’arrivée, alors :
ses ensembles de départ et d’arrivée, alors :



Exemple 2
Pour  , il est clair que
, il est clair que  et que
et que  est l’ensemble des entiers naturels impairs.
est l’ensemble des entiers naturels impairs.
Revenons au cas général et formulons trois remarques concernant une application .
- La condition
 , lorsqu’elle est remplie, exprime la surjectivité de (tout élément de possède au moins un antécédent par ).
, lorsqu’elle est remplie, exprime la surjectivité de (tout élément de possède au moins un antécédent par ). - Si
 , alors
, alors  .
. - Enfin :
 .
.
Continuons maintenant notre exploration, avec de nouveaux exemples…
Exemple 3
Pour  , il est clair que
, il est clair que  .
.
En fait :  , mais pour quelle raison ? Et sauriez-vous déterminer
, mais pour quelle raison ? Et sauriez-vous déterminer ![g\left\langle \left[-1,2\right]\right\rangle](https://math-os.com/wp-content/ql-cache/quicklatex.com-f7cbe6d4eddc74f1d39857d90a7bbed1_l3.png "Rendered by QuickLaTeX.com") ?
?
Réponses détaillées en ANNEXE, à la fin de l’article.
Exemple 4
Notons  et considérons l’application
et considérons l’application
![\[P:E^{2}\rightarrow\mathbb{N},\thinspace\left(a,b\right)\mapsto ab\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d44ea96679c605c3c68a6d6d560eac83_l3.png "Rendered by QuickLaTeX.com")
Alors  est l’ensemble des entiers naturels pouvant s’écrire comme le produit de deux entiers strictement positifs, mais de manière non triviale (puisqu’aucun des deux facteurs ne peut valoir 1).
est l’ensemble des entiers naturels pouvant s’écrire comme le produit de deux entiers strictement positifs, mais de manière non triviale (puisqu’aucun des deux facteurs ne peut valoir 1).
On voit ainsi que est l’ensemble des nombres composés (autrement dit : non premiers) et supérieurs ou égaux à 4.
2 – On marque une pause pour réfléchir à la notation

Vous vous demandez peut-être pourquoi je m’obstine à utiliser la notation alors qu’on trouve, dans pas mal de bouquins, la notation  .
.
La raison est simple. Il faut à tout prix éviter la confusion entre :
- d’une part, l’image d’un élément
- d’autre part, l’image directe d’une partie
Aucun risque, me direz-vous : un élément et un partie, ce n’est pas la même chose ! Le contexte doit donc permettre de savoir de quoi on parle.
Il faut reconnaître que c’est souvent le cas en pratique… mais pas toujours !
Considérons l’ensemble :
![\[X=\left\{ 0,1,2,\left\{ 0,1\right\} \right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fac021f39d19b9cb6b54a7f6d1d74eba_l3.png "Rendered by QuickLaTeX.com")
, donc l’ensemble  est une partie de . Mais c’est aussi un élément de …! Dans ces conditions, si est une application (peu importe l’ensemble d’arrivée ), il est indispensable de noter différemment l’image de l’élément et l’image directe de la partie .
est une partie de . Mais c’est aussi un élément de …! Dans ces conditions, si est une application (peu importe l’ensemble d’arrivée ), il est indispensable de noter différemment l’image de l’élément et l’image directe de la partie .
Pas clair ? Allons au bout de cet exemple en définissant complètement :
![\[f\left(0\right)=3\qquad f\left(1\right)=4,\quad f\left(2\right)=5,\quad f\left(\left\{ 0,1\right\} \right)=6\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-572445759009162b1a4a4808e4dec275_l3.png "Rendered by QuickLaTeX.com")
![\[f\left\langle \left\{ 0,1\right\} \right\rangle =\left\{ 3,4\right\} \neq6=f\left(\left\{ 0,1\right\} \right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-786c4581bcbc91dc4e299423856e39b2_l3.png "Rendered by QuickLaTeX.com")
J’espère vous avoir convaincu de la nécessité de noter différemment l’image d’un élément et l’image directe d’une partie.
3 – Deux exemples plus élaborés d’images directes
Exemple 5
Considérons l’application
![\[\varphi:\mathbb{R}^{2}\rightarrow\mathbb{R}^{2},\thinspace\left(a,b\right)\mapsto\left(a+b,ab\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5486beacd9452a91c4cc05a89f44a0dc_l3.png "Rendered by QuickLaTeX.com")
 . Observons pour commencer que si
. Observons pour commencer que si  , alors il existe
, alors il existe  tel que :
tel que : ![\[\left\{ \begin{array}{ccc}x & = & a+b\\y & = & ab\end{array}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f5103178747def3c748f4242d1cb3957_l3.png "Rendered by QuickLaTeX.com")
![\[x^{2}-4y=\left(a+b\right)^{2}-4ab=\left(a-b\right)^{2}\geqslant0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6057e9b75cbb0c0f791f63d2aa2293a6_l3.png "Rendered by QuickLaTeX.com")
 , on a donc
, on a donc  .
.
Voyons maintenant ce qu’il en est de l’inclusion inverse…
Soit  un couple de nombres réels vérifiant
un couple de nombres réels vérifiant  .
.
Le discriminant de l’équation d’inconnue  :
:
![\[T^{2}-xT+y=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8f81f6d0d3c52c88db964f048343f366_l3.png "Rendered by QuickLaTeX.com")
 et
et  réelles (éventuellement confondues) et l’on sait (relations entre coefficients et racines) que :
réelles (éventuellement confondues) et l’on sait (relations entre coefficients et racines) que : ![\[a+b=x\qquad\text{et}\qquad ab=y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8a75d98af80027211c890ac077e428b6_l3.png "Rendered by QuickLaTeX.com")
Si les « relations entre coefficients et racines » ne vous sont pas familières, vous pouvez simplement calculer :
![\[a+b=\frac{x-\sqrt{x^{2}-4y}}{2}+\frac{x+\sqrt{x^{2}-4y}}{2}=x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9913eb3cf532a44cf0626414269dd0ff_l3.png "Rendered by QuickLaTeX.com")
![\[ab=\frac{x-\sqrt{x^{2}-4y}}{2}\;\frac{x+\sqrt{x^{2}-4y}}{2}=\frac{x^{2}-\left(x^{2}-4y\right)}{4}=y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c5e4eb80b0b27450b76ba47f75846d1b_l3.png "Rendered by QuickLaTeX.com")
L’inclusion inverse est établie et finalement :
![\[\boxed{\varphi\left\langle \mathbb{R}^{2}\right\rangle =V}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-72ef8948d1676c7701c3f42389671f03_l3.png "Rendered by QuickLaTeX.com")
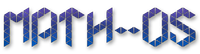
Au passage,  est l’union de la parabole d’équation
est l’union de la parabole d’équation  et de son « extérieur ». Dans la figure ci-dessous, est colorié en bleu :
et de son « extérieur ». Dans la figure ci-dessous, est colorié en bleu :
Exemple 6
On sait depuis près de 23 siècles qu’il existe une infinité de nombres premiers. La preuve proposée par Euclide (Eléments, Livre IX, proposition 20) se résume à ceci :
Si  sont des nombres premiers tous distincts, alors l’entier
sont des nombres premiers tous distincts, alors l’entier  n’est divisible par aucun des
n’est divisible par aucun des  pour
pour  . Ses facteurs premiers se situent donc tous hors de l’ensemble
. Ses facteurs premiers se situent donc tous hors de l’ensemble  .
.
Euclide prouve ainsi que l’ensemble ne saurait contenir tous les nombres premiers, d’où il déduit que l’ensemble  des nombres premiers est infini.
des nombres premiers est infini.
Considérons maintenant l’application  définie par :
définie par :

- Pour tout entier
 ,
,  désigne le plus petit facteur premier de
désigne le plus petit facteur premier de![\[Q_{n}=1+\prod_{i=1}^{n}\psi\left(i\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-27d20d4567ad04fcf04741b6e699d2ae_l3.png "Rendered by QuickLaTeX.com")
Par construction et d’après l’argument d’Euclide, les nombres  sont tous premiers et sont deux à deux distincts. Calculons pour les petites valeurs de
sont tous premiers et sont deux à deux distincts. Calculons pour les petites valeurs de  :
:
 , donc
, donc 
 , donc
, donc 
 , donc
, donc 
 , donc
, donc 
 , donc
, donc 

C’est à vous !! Réponse en ANNEXE, à la fin d’article.
La suite  est connue sous le nom de suite de Euclide-Mullin (voir la note Recursive function theory (A modern look at a Euclidean idea) publiée en 1963 par A.A. Mullin dans le Bulletin of the American Mathematical Society).
est connue sous le nom de suite de Euclide-Mullin (voir la note Recursive function theory (A modern look at a Euclidean idea) publiée en 1963 par A.A. Mullin dans le Bulletin of the American Mathematical Society).
Il est bien évident que  , mais la question de savoir si tout nombre premier est (ou non) un terme de cette suite demeure, depuis plus d’un demi-siècle, un problème ouvert !
, mais la question de savoir si tout nombre premier est (ou non) un terme de cette suite demeure, depuis plus d’un demi-siècle, un problème ouvert !
En d’autres termes, on ne connaît pas à ce jour l’image directe de  par
par  .
.
4 – Image réciproque : définition et premiers exemples
Considérons une application et une partie (= un sous-ensemble)  de .
de .
On appelle image réciproque de par l’ensemble :
![\[\fcolorbox{black}{myBlue}{$f^{-1}\left\langle B\right\rangle =\left\{ x\in X;\thinspace f\left(x\right)\in B\right\}$}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-71477da36ad25e12f095dc6f9b0407c7_l3.png "Rendered by QuickLaTeX.com")
«  est l’ensemble des éléments
est l’ensemble des éléments  de dont l’image par appartient à ».
de dont l’image par appartient à ».
Autrement dit : est l’ensemble des antécédents par des éléments de .
Exemple 7
On recommence avec les « patates »…
En notant à nouveau l’application représentée ci-contre et ses ensembles de départ et d’arrivée :


 .
.
Exemple 8
Reprenons l’application  de l’exemple
de l’exemple  :
:
![\[g:\mathbb{R}\rightarrow\mathbb{R},\thinspace x\mapsto x^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b64f0da3d61d1881ef4f2bc288504a14_l3.png "Rendered by QuickLaTeX.com")
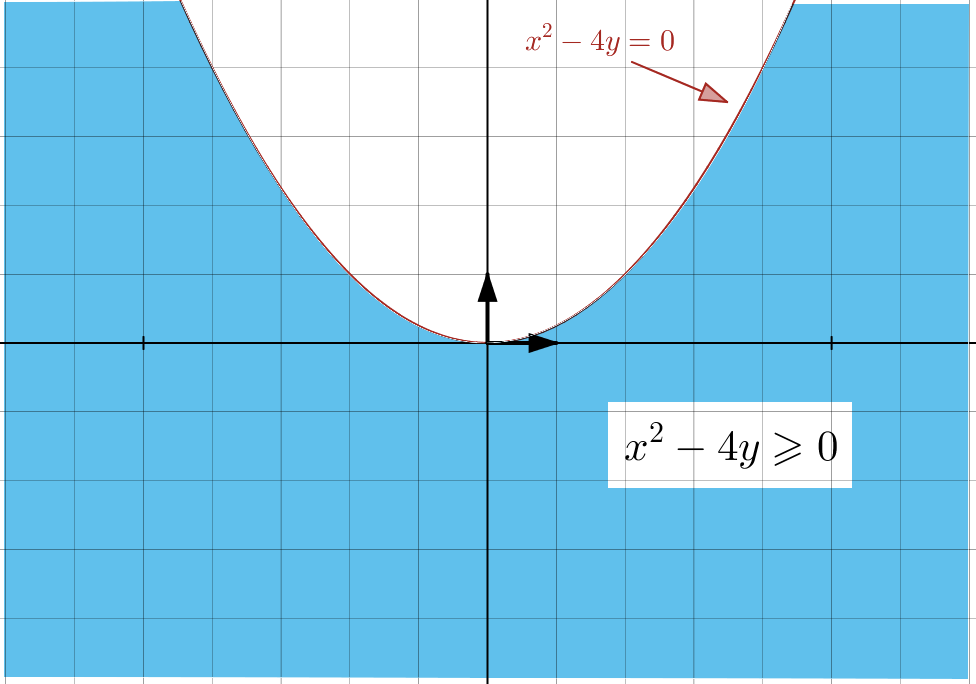
![g^{-1}\left\langle \left[1,4\right]\right\rangle](https://math-os.com/wp-content/ql-cache/quicklatex.com-bc282684d847a867f071adf2fc1a7889_l3.png "Rendered by QuickLaTeX.com") . Par définition :
. Par définition : ![\[g^{-1}\left\langle \left[1,4\right]\right\rangle =\left\{x\in\mathbb{R};\thinspace1\leqslant x^{2}\leqslant4\right\} =\left\{x\in\mathbb{R};\thinspace x^{2}\geqslant1\right} \cap\left{ x\in\mathbb{R};\thinspace x^{2}\leqslant4\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f1c93ee84402cc87c28a252a8e902712_l3.png "Rendered by QuickLaTeX.com")
Or, d’une part :
![\[\left{ x\in\mathbb{R};\thinspace x^{2}\geqslant1\right} =\left]-\infty,-1\right]\cup\left[1,+\infty\right[\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e0c377461bdd7fed7415f5ad19882892_l3.png "Rendered by QuickLaTeX.com")
![\[\left{ x\in\mathbb{R};\thinspace x^{2}\leqslant4\right} =\left[-2,2\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-74dac8dce5c7bb3a45386876a99e5cba_l3.png "Rendered by QuickLaTeX.com")
Ainsi :
![\[\boxed{g^{-1}\left\langle \left[1,4\right]\right\rangle =\left[-2,-1\right]\cup\left[1,2\right]}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8a944736f572fbd71c4d9201c3c5cf7d_l3.png "Rendered by QuickLaTeX.com")
Cette relation est visualisée avec l’illustration suivante :
Exemple 9
Dans le cours de première année, on démontre que si  ,
, sont deux
sont deux  -espaces vectoriels et si
-espaces vectoriels et si  est linéaire, alors pour tout sous-espace vectoriel (sev)
est linéaire, alors pour tout sous-espace vectoriel (sev)  de , l’image réciproque de par
de , l’image réciproque de par  est un sous-espace vectoriel de . Vérifions ensemble cette propriété.
est un sous-espace vectoriel de . Vérifions ensemble cette propriété.
On notera  et
et  les vecteurs nuls respectifs de et de .
les vecteurs nuls respectifs de et de .
Il s’agit de prouver d’une part que  et d’autre part que
et d’autre part que  est stable par combinaison linéaire.
est stable par combinaison linéaire.
Tout d’abord, comme est linéaire, on sait que  . Par ailleurs, étant un sev de , on sait aussi que
. Par ailleurs, étant un sev de , on sait aussi que  . Il en résulte que :
. Il en résulte que :
![\[\boxed{0_{E}\in u^{-1}\left\langle F'\right\rangle}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ef088e3d8adb7ca5f019a3db8850b770_l3.png "Rendered by QuickLaTeX.com")
Donnons-nous ensuite des vecteurs  dans et un scalaire
dans et un scalaire  . Afin de prouver que
. Afin de prouver que  , on calcule :
, on calcule :
![\[u\left(\lambda x+y\right)=\lambda\thinspace\underbrace{u\left(x\right)}_{\in F'}+\underbrace{u\left(y\right)}_{\in F'}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ff90ef80708658fb04019581d04ab9d9_l3.png "Rendered by QuickLaTeX.com")
par combinaison linéaire. On voit ainsi que  , ce qui règle la question.
, ce qui règle la question.
Notons au passage qu’un cas particulier fondamental est celui où  ; dans ce cas, n’est autre que le noyau de . C’est ainsi que le noyau de toute application linéaire est un sev de son espace de départ.
; dans ce cas, n’est autre que le noyau de . C’est ainsi que le noyau de toute application linéaire est un sev de son espace de départ.
5 – Une ambiguïté qui n’en est pas une
Etant donnée une bijection  , la notation
, la notation  est utilisée pour désigner sa bijection réciproque. Par conséquent, si
est utilisée pour désigner sa bijection réciproque. Par conséquent, si  , une ambiguïté potentielle surgit lorsqu’on écrit
, une ambiguïté potentielle surgit lorsqu’on écrit  .
.
S’agit-il :
- de l’image réciproque de par ?
- ou bien de l’image directe de par ?
Qu’on se rassure, cette ambiguïté n’est qu’apparente, car ces deux ensembles sont confondus. Prouvons cela en vérifiant soigneusement la double-inclusion.
Notons l’image réciproque de par et  l’image directe de par :
l’image directe de par :
- les éléments de sont, par définition, les éléments de vérifiant
 ,
, - les éléments de sont ceux de la forme
 , pour
, pour  dans .
dans .
Si  , alors
, alors  . Ceci prouve que
. Ceci prouve que 
Réciproquement, si  alors il existe
alors il existe  tel que
tel que  , donc
, donc  , ce qui prouve que , autrement dit que . Ceci prouve que
, ce qui prouve que , autrement dit que . Ceci prouve que 
La double-inclusion est établie.
Ajoutons pour finir que si n’est pas bijective, alors le symbole n’est pas défini s’il est utilisé seul ! Mais on bien sûr écrire pour tout .
6 – Quatre pattes ➡ Un mouton
En combinatoire, on utilise parfois le résultat suivant, connu sous le nom de « lemme des bergers ».
Etant donnés deux ensembles  , on suppose que est fini et qu’il existe une application dont les fibres ont toutes le même cardinal
, on suppose que est fini et qu’il existe une application dont les fibres ont toutes le même cardinal  .
.
Alors est fini et :
![\[\boxed{\text{card}\left(E\right)=k\thinspace\text{card}\left(F\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1ef108135e7df005edea9909623051f1_l3.png "Rendered by QuickLaTeX.com")
, ce sont (par définition) les images réciproques des singletons. Voici donc une version formalisée du même énoncé : ![\[\left[\exists k\in\mathbb{N}^{\star};\thinspace\forall y\in F,\thinspace\text{card}\left(u^{-1}\left\langle \left\{ y\right\} \right\rangle \right)=k\right]\Rightarrow\left[\text{card}\left(E\right)=k\thinspace\text{card}\left(F\right)\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-495a2b5a5957ab0be8faf40fa3d1de75_l3.png "Rendered by QuickLaTeX.com")
est l’union des fibres de . En tant qu’union finie d’ensembles finis, est fini. De plus, cette union étant disjointe, le cardinal de est la somme des cardinaux des fibres, d’où la formule annoncée.
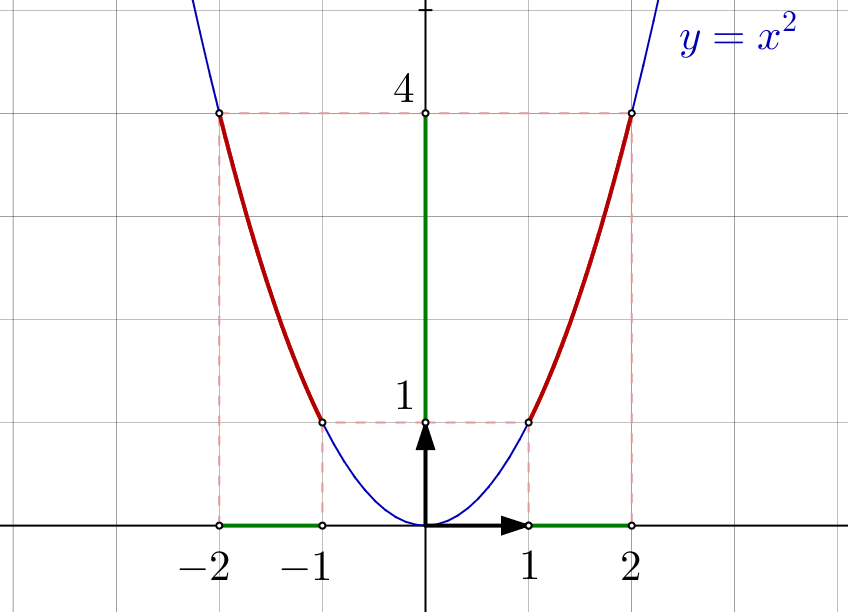
L’appellation « lemme des bergers » provient sans doute d’une plaisanterie : on imagine un berger voulant connaître le nombre de moutons de son troupeau… il lui suffit de compter les pattes puis de diviser par 4 l’entier obtenu !
L’illustration ci-dessous représente l’application qui va de l’ensemble des pattes vers celui des moutons et qui, à chaque patte, associe le mouton auquel elle appartient 🙂
Pour cette application, le lemme s’applique avec  . On suppose évidemment que les moutons sont en bonne santé et qu’ils n’ont pas été manipulés génétiquement …
. On suppose évidemment que les moutons sont en bonne santé et qu’ils n’ont pas été manipulés génétiquement …
Citons un exemple d’utilisation du lemme des bergers :
Proposition
Si sont finis de cardinaux respectifs  et n avec
et n avec  , alors il existe
, alors il existe  injections de vers .
injections de vers .
On peut prouver cette proposition en raisonnant par récurrence sur le cardinal de (celui de étant fixé). Pour  , les applications possibles sont évidemment toutes injectives, ce qui initialise la récurrence. Supposons la propriété établie au rang , pour un certain
, les applications possibles sont évidemment toutes injectives, ce qui initialise la récurrence. Supposons la propriété établie au rang , pour un certain  , et donnons-nous deux ensembles de cardinaux respectifs
, et donnons-nous deux ensembles de cardinaux respectifs  et .
et .
Fixons un élément de et considérons l’application
![\[u:\text{Inj}\left(E,F\right)\rightarrow\text{Inj}\left(E-\left\{ x\right\} ,F\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-935c66334b2a87433479b29da9304f7c_l3.png "Rendered by QuickLaTeX.com")
vers associe sa restriction à  . Par hypothèse de récurrence,
. Par hypothèse de récurrence,  .
.
Comme chaque injection de vers peut être prolongée de  façons en une injection de vers (en associant à l’un quelconque des éléments encore disponibles), on voit que le lemme des bergers s’applique à et que :
façons en une injection de vers (en associant à l’un quelconque des éléments encore disponibles), on voit que le lemme des bergers s’applique à et que :
![\[\text{card}\left(\text{Inj}\left(E,F\right)\right)=\left(n-p\right)\:\text{card}\left(\text{Inj}\left(E-\left\{ x\right\} ,F\right)\right)=n\left(n-1\right)\cdots\left(n-p\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-66c14d2a7b5d9cb8fb4b17746c50c92b_l3.png "Rendered by QuickLaTeX.com")
7 – Image réciproque d’une image directe
Si et  , alors
, alors  . En effet, si
. En effet, si  , alors
, alors  (par définition de ) et donc
(par définition de ) et donc  (par définition de avec
(par définition de avec  ).
).
Mais cette inclusion est en général stricte. Considérons en effet l’unique application  et posons
et posons  . Alors :
. Alors :
![\[f^{-1}\left\langle f\left\langle A\right\rangle \right\rangle =f^{-1}\left\langle \left\{ 2\right\} \right\rangle =\left\{ 0,1\right\} \neq A\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-da8593f367df7a88d8ceb40b73180cce_l3.png "Rendered by QuickLaTeX.com")
Cependant :
Proposition A
Si est injective, alors  , pour toute partie de .
, pour toute partie de .
En effet, étant donné , si  , alors
, alors  ce qui signifie qu’il existe tel que
ce qui signifie qu’il existe tel que  . Comme est injective, alors
. Comme est injective, alors  et donc
et donc  . Quant à l’autre inclusion, elle a été établie en toute généralité.
. Quant à l’autre inclusion, elle a été établie en toute généralité.
La réciproque de l’implication précédente est vraie :
Proposition réciproque
Si est telle que pour toute partie de , alors est injective.
En effet, soient  tels que
tels que  . En choisissant
. En choisissant  dans l’hypothèse, on constate que
dans l’hypothèse, on constate que  . Or
. Or  et donc
et donc  .
.
8 – Image directe d’une image réciproque
Si et , alors  . En effet, si
. En effet, si  , alors (par définition de avec
, alors (par définition de avec  ) il existe
) il existe  tel que
tel que  et donc
et donc  .
.
L’inclusion inverse n’est pas vraie en général, comme on le voit en considérant par exemple  définie par
définie par  et
et  . On constate que :
. On constate que :
![\[f\left\langle f^{-1}\left\langle B\right\rangle \right\rangle =f\left\langle \left\{ 0\right\} \right\rangle =\left\{ 1\right\} \neq B\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a63442c119179c07ca09053d4a4995d1_l3.png "Rendered by QuickLaTeX.com")
Proposition B
Si est surjective, alors  pour toute partie de .
pour toute partie de .
En effet, étant donné , si , alors il existe (par surjectivité de ) un élément tel que  . Manifestement
. Manifestement  et donc .
et donc .
Réciproquement …
Proposition réciproque
Si est telle que pour toute partie de , alors est surjective.
En effet, soit  . En choisissant
. En choisissant  dans l’hypothèse, on voit que
dans l’hypothèse, on voit que  . Ainsi
. Ainsi  ; autrement dit, admet un antécédent par .
; autrement dit, admet un antécédent par .
9 – Image réciproque et topologie
Etant donnés un espace métrique (par exemple un espace vectoriel normé ou une partie d’un tel espace) ainsi qu’une partie  de , on a parfois besoin de prouver que est un ouvert de . Pour cela, plusieurs méthodes existent. On peut…
de , on a parfois besoin de prouver que est un ouvert de . Pour cela, plusieurs méthodes existent. On peut…
- appliquer la définition d’un ouvert (c’est-à-dire vérifier, pour chaque
 , l’existence d’une boule ouverte de centre incluse dans ),
, l’existence d’une boule ouverte de centre incluse dans ), - prouver que le complémentaire dans de est un fermé, en appliquant par exemple la caractérisation séquentielle des fermés (c’est-à-dire en vérifiant que pour toute suite convergente
 à termes dans le complémentaire de , la limite de cette suite appartient encore à ),
à termes dans le complémentaire de , la limite de cette suite appartient encore à ), - trouver un espace métrique , un ouvert
 de et une application continue tels que
de et une application continue tels que  .
.
Cette troisième méthode repose donc sur le fait que « l’image réciproque d’un ouvert par une application continue est un ouvert ».
Par simple passage au complémentaire, on dispose de l’énoncé jumeau : « l’image réciproque d’un fermé par une application continue est un fermé ».
Ces deux énoncés s’avèrent très utiles en pratique. Donnons-en trois exemples d’utilisation.
Exemple 10 – A
Dans  , l’hyperbole d’équation
, l’hyperbole d’équation  est un fermé car c’est l’image réciproque du fermé
est un fermé car c’est l’image réciproque du fermé  de
de  par l’application
par l’application  , qui est continue (puisque polynomiale).
, qui est continue (puisque polynomiale).
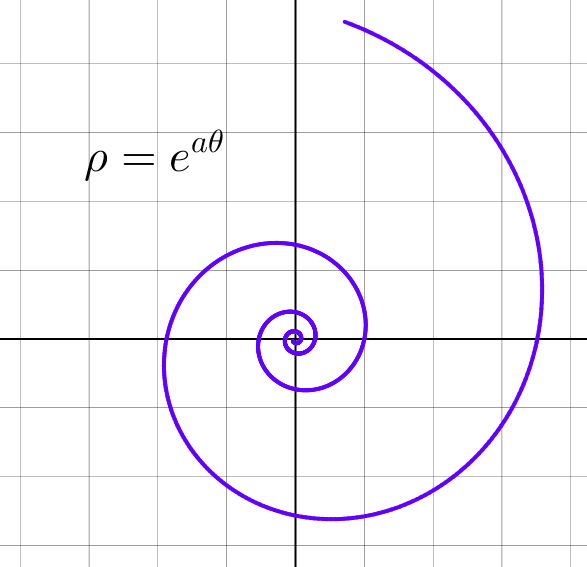
Plus généralement, toute courbe d’équation  où
où  est continue, est une partie fermée de .
est continue, est une partie fermée de .
Ceci montre que les courbes  d’équation polaire :
d’équation polaire :
![\[\rho=e^{a\theta}\qquad\left(a>0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-42e876e78e4a20b8a2f231f10e817d3c_l3.png "Rendered by QuickLaTeX.com")
avec continue. En effet, n’est pas fermée, car l’origine est un point asymptote qui n’appartient pas à la courbe.
Exemple 10 – B
Dans  , le groupe
, le groupe  des matrices carrées inversibles est un ouvert puisque c’est l’image réciproque de l’ouvert
des matrices carrées inversibles est un ouvert puisque c’est l’image réciproque de l’ouvert  de
de  par l’application
par l’application  qui est continue (puisque polynomiale, elle aussi).
qui est continue (puisque polynomiale, elle aussi).
On peut d’ailleurs montrer, plus précisément, que est un ouvert dense : toute matrice  est la limite d’une suite de matrices inversibles (il suffit de considérer la suite matricielle de terme général
est la limite d’une suite de matrices inversibles (il suffit de considérer la suite matricielle de terme général  , pour ).
, pour ).
Exemple 10 – C
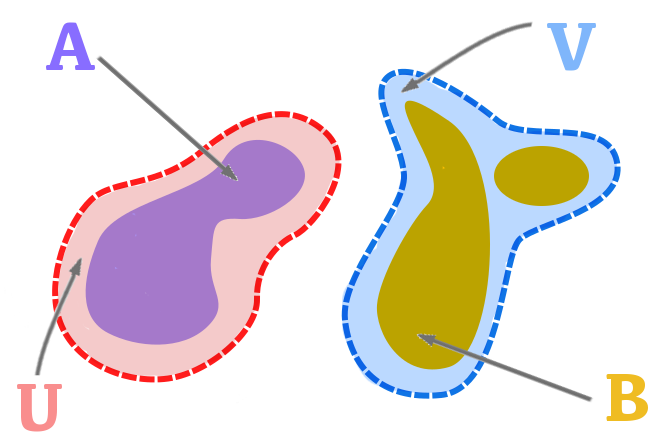
Dans , considérons deux parties et , non vides et disjointes (on pourrait, sans rien changer d’essentiel, remplacer dans ce qui suit par un espace métrique quelconque).
Une question classique consiste se demander si l’on peut les séparer, c’est-à-dire s’il existe des ouverts  et disjoints tels que
et disjoints tels que  et
et  . La réponse est en général négative, mais si et sont fermés, elle devient affirmative !
. La réponse est en général négative, mais si et sont fermés, elle devient affirmative !
En effet, notons :
➡  la norme euclidienne d’un vecteur
la norme euclidienne d’un vecteur  .
.
➡  la distance d’un vecteur
la distance d’un vecteur  à une partie , définie par :
à une partie , définie par :
![\[d\left(v,X\right)=\inf\left\{ \left\Vert v-x\right\Vert ;\thinspace x\in X\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-3868c11e57d85aacc63f1c90b9d13376_l3.png "Rendered by QuickLaTeX.com")
Pour tout  , l’application
, l’application  est continue car
est continue car  lipschitzienne.
lipschitzienne.
On sait par ailleurs que  si, et seulement si,
si, et seulement si,  (l’adhérence de ). En particulier, si est fermé dans , alors :
(l’adhérence de ). En particulier, si est fermé dans , alors :  .
.
Sauriez-vous établir ces points ? Solution en ANNEXE !
l’application définie sur par :
![\[\forall v\in\mathbb{R}^{2},\:f\left(v\right)=d\left(v,A\right)-d\left(v,B\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-12ffab1748a5945ba0a9e09f02480395_l3.png "Rendered by QuickLaTeX.com")
Comme est continue (différence de deux applications continues), alors les ensembles
![\[\boxed{U=f^{-1}\left\langle \left]-\infty,0\right[\right\rangle} \qquad\text{et}\qquad \boxed{V=f^{-1}\left\langle \left]0,+\infty\right[\right\rangle}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-55570be4223a62b28c274598601fa56b_l3.png "Rendered by QuickLaTeX.com")
car chacun est l’image réciproque d’un ouvert de . Ils sont évidemment disjoints et de plus : ![\[A\subset U\qquad\text{et}\qquad B\subset V\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-148c0c2ffde803914f5390c7e4e9ad17_l3.png "Rendered by QuickLaTeX.com")
 , alors d’une part
, alors d’une part  et, d’autre part,
et, d’autre part,  d’où
d’où  puisque est fermé; ainsi :
puisque est fermé; ainsi :  . Ceci montre que .
. Ceci montre que .
On voit de même que . On peut donc toujours séparer, dans comme dans n’importe quel espace métrique, deux fermés non vides et disjoints.
Terminons en remarquant que l’image directe d’un ouvert par une application continue n’est pas, en général, un ouvert de l’espace d’arrivée. Par exemple, l’application
![\[\mathbb{R}\rightarrow\mathbb{R},x\mapsto\sin\left(x\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9fb00ea1e9d01f6c18ee27618b1f0b1f_l3.png "Rendered by QuickLaTeX.com")
![\left]0,\pi\right[](https://math-os.com/wp-content/ql-cache/quicklatex.com-576ed345a641d1f24c1ca696ba1051ae_l3.png "Rendered by QuickLaTeX.com") en
en ![\left]0,1\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8a93762d35a79b039a3067f8cd5dd7d0_l3.png "Rendered by QuickLaTeX.com") , qui n’est pas ouvert.
, qui n’est pas ouvert.
10 – Annexe
Section 1 – Exemple 3
- C’est une conséquence du théorème des valeurs intermédiaires. Considérons en effet un réel
 . Comme
. Comme  , il existe
, il existe  tel que
tel que  . Comme
. Comme  et
et  sont atteints par , alors tout réel compris entre et est aussi atteint : c’est en particulier le cas de . Ceci prouve que
sont atteints par , alors tout réel compris entre et est aussi atteint : c’est en particulier le cas de . Ceci prouve que  . L’inclusion réciproque étant évidente (le carré de tout nombre réel est positif ou nul), on a l’égalité.
. L’inclusion réciproque étant évidente (le carré de tout nombre réel est positif ou nul), on a l’égalité. - Les variations de (décroissance sur
![\left]-\infty,0\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2a8d889c1500417239792c75ec84b984_l3.png "Rendered by QuickLaTeX.com") et croissance sur
et croissance sur  ) et sa continuité montrent que
) et sa continuité montrent que
et que![\[g\left\langle \left[-1,0\right]\right\rangle =\left[g\left(0\right),g\left(-1\right)\right]=\left[0,1\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-33dca335d61fa1d0106df1b183efcd2d_l3.png "Rendered by QuickLaTeX.com")
Par conséquent :![\[g\left\langle \left[0,2\right]\right\rangle =\left[g\left(0\right),g\left(2\right)\right]=\left[0,4\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-36c0f445aa11d83d13d5465f5cc6273c_l3.png "Rendered by QuickLaTeX.com")
![\[g\left\langle \left[-1,2\right]\right\rangle =g\left\langle \left[-1,0\right]\cup\left[0,2\right]\right\rangle =g\left\langle \left[-1,0\right]\right\rangle \cup g\left\langle \left[0,2\right]\right\rangle =\left[0,4\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-3299a0b846c08dd4c316baa0491967fe_l3.png "Rendered by QuickLaTeX.com")
Section 3 – Exemple 6
Après 



 et
et  le terme suivant est
le terme suivant est  . En effet :
. En effet :
![\[1+2\times3\times7\times43\times13\times53=1\thinspace244\thinspace335\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2df671c3666163076659b683f9690345_l3.png "Rendered by QuickLaTeX.com")
. Quant au suivant, il est un peu plus gros… On calcule : ![\[1+2\times3\times7\times43\times13\times53\times5=6\thinspace221\thinspace671\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fe30c2981d64a18dcaf34058c7c6ec8f_l3.png "Rendered by QuickLaTeX.com")
Section 9 – Point numéro 3
Deux propriétés de la distance à une partie
- Soient
 . Pour tout :
. Pour tout :
et donc :![\[d\left(v,X\right)\leqslant\left\Vert v-x\right\Vert =\left\Vert v-w+w-x\right\Vert \leqslant\left\Vert v-w\right\Vert +\left\Vert w-x\right\Vert\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-87301a902722626655a1930275e7e437_l3.png "Rendered by QuickLaTeX.com")
En passant à la borne inférieure :![\[d\left(v,X\right)-\left\Vert v-w\right\Vert \leqslant\left\Vert w-x\right\Vert\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-520eb42b519375ff1531b0c2b3d4e42b_l3.png "Rendered by QuickLaTeX.com")
Autrement dit :![\[d\left(v,X\right)-\left\Vert v-w\right\Vert \leqslant d\left(w,X\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ac2d6a49b4577a1356a9234ae501c3a3_l3.png "Rendered by QuickLaTeX.com")
Mais![\[d\left(v,X\right)-d\left(w,X\right)\leqslant\left\Vert v-w\right\Vert\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-cc4e93c8365769fdf09728a9453e7e47_l3.png "Rendered by QuickLaTeX.com") et
et  jouent ici des rôles symétriques ! On a donc aussi :
jouent ici des rôles symétriques ! On a donc aussi :
d’où finalement :![\[d\left(w,X\right)-d\left(v,X\right)\leqslant\left\Vert v-w\right\Vert\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-06ff007c383143ce6f8ca87522323fd3_l3.png "Rendered by QuickLaTeX.com")
Ceci montre que l’application![\[\boxed{\left|d\left(v,X\right)-d\left(w,X\right)\right|\leqslant\left\Vert v-w\right\Vert}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-64271c0651f114844244652b64a697b8_l3.png "Rendered by QuickLaTeX.com")
 est lipschitzienne, donc continue.
est lipschitzienne, donc continue. - Si alors, d’après la caractérisation séquentielle d’une borne inférieure, il existe une suite
 d’éléments de telle que
d’éléments de telle que  . On voit ainsi que est adhérent à X. Réciproquement, si est adhérent à , alors une telle suite existe et en passant à la limite dans l’encadrement
. On voit ainsi que est adhérent à X. Réciproquement, si est adhérent à , alors une telle suite existe et en passant à la limite dans l’encadrement  , on obtient .
, on obtient .
Vos questions ou remarques sont les bienvenues. Vous pouvez laisser un commentaire ci-dessous ou bien passer par le formulaire de contact.
Bonsoir Monsieur,
Merci pour cet article !
On comprend très bien sans, mais sauf erreur de ma part, il manque quelques accolades ensemblistes dans :
– l’exemple 8 de la section 4 ;
– les trois dernières lignes qui précédent la section 8 ;
– les deux dernières lignes qui précédent la section 9.
Bien à vous
C’est corrigé ! Merci, une fois encore, pour votre lecture millimétrique 🙂