
Lettre B
BASE CANONIQUE
Si  est un espace vectoriel abstrait de dimension finie
est un espace vectoriel abstrait de dimension finie  il n’existe pas parmi les bases de de base privilégiée.
il n’existe pas parmi les bases de de base privilégiée.
En revanche, lorsque est explicitement identifié, on peut généralement distinguer une base plus naturelle, plus standard, que toute autre.
Cette base est appelée la base canonique de 
➢ Par exemple, si  alors sa base canonique est
alors sa base canonique est  où l’on a posé :
où l’on a posé :

➢ Autre exemple, si ![E=\mathbb{K}_{n}\left[X\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-cc5490ffc2f3be5d38c75b4b25c37775_l3.png "Rendered by QuickLaTeX.com") (espace de polynômes de degré inférieur ou égal à
(espace de polynômes de degré inférieur ou égal à  alors sa base canonique est :
alors sa base canonique est :
![\[\left(1,X,X^{2},\cdots,X^{n}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f6d3978547e7e2ea17dbc94df9d5c29f_l3.png "Rendered by QuickLaTeX.com")
 est la suite presque nulle :
est la suite presque nulle : ![\[\left(0,0,0,\cdots0,1,0,\cdots\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-23c2f2e3a116940f7b5abe2d011ed390_l3.png "Rendered by QuickLaTeX.com")
 ème, qui vaut 1 (attention : les termes de la suite sont numérotés à partir de l’indice 0).
ème, qui vaut 1 (attention : les termes de la suite sont numérotés à partir de l’indice 0).
Encore un, pour la route …
➢ Si  (espace des matrices rectangulaires à
(espace des matrices rectangulaires à  lignes et
lignes et  colonnes), alors sa base canonique est formée des matrices élémentaires :
colonnes), alors sa base canonique est formée des matrices élémentaires :
![\[ E_{r,s}=\left[\delta_{i,r}\delta_{j,s}\right]_{{1\leqslant i\leqslant n\atop 1\leqslant j\leqslant q}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-29dabc86adfc2f773d1e8cd69f368d9c_l3.png "Rendered by QuickLaTeX.com")

 et où
et où  est le symbole de Kronecker.
est le symbole de Kronecker.
Autrement dit,  est la matrice dont tous les termes sont nuls à l’exception de celui situé à l’intersection de la ligne
est la matrice dont tous les termes sont nuls à l’exception de celui situé à l’intersection de la ligne  et de la colonne
et de la colonne  qui vaut 1. On reconnaît encore la même idée.
qui vaut 1. On reconnaît encore la même idée.
Noter que l’ordre des vecteurs dans une base a son importance; il faut donc le préciser en cas de doute. Aucun doute pour les deux premiers exemples, mais les choses sont moins nettes pour les matrices élémentaires. On peut adopter par défaut l’ordre lexicographique sur les couples  Ainsi, dans le cas particulier où
Ainsi, dans le cas particulier où  et
et  , la base canonique de
, la base canonique de  sera :
sera :
![\[\left(E_{1,1},\,E_{1,2},\,E_{1,3},\,E_{2,1},\,E_{2,2},\,E_{2,3}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9b09e5537e58505e5cecbe9774298bd9_l3.png "Rendered by QuickLaTeX.com")
BERNOULLI (inégalité)
Proposition
Etant donné un réel ![x\in\left]-1,0\right[\cup\left]0,+\infty\right[](https://math-os.com/wp-content/ql-cache/quicklatex.com-677bbe18a25827b85fb9a1cdee802540_l3.png "Rendered by QuickLaTeX.com") ainsi qu’un entier
ainsi qu’un entier  :
:
![\[\left(1+x\right)^{n}>1+nx\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9b84c2239faad111915f3cd05db1f299_l3.png "Rendered by QuickLaTeX.com")
On prouve ceci par récurrence. Pour  c’est immédiat puisque
c’est immédiat puisque  :
:
![\[\left(1+x\right)^{2}=1+2x+x^{2}>1+2x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-57413591b6c45c515fc9bcf00580520b_l3.png "Rendered by QuickLaTeX.com")
: 
 Or :
Or : ![\[\left(1+nx\right)\left(1+x\right)=1+\left(n+1\right)x+nx^{2}>1+\left(n+1\right)x\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bc9efdeeb9c310e1755f8b9cd77f0b9d_l3.png "Rendered by QuickLaTeX.com")
Remarque
Si  on peut aussi s’en sortir avec la formule du binôme :
on peut aussi s’en sortir avec la formule du binôme :
![\[\left(1+x\right)^{n}=\sum_{k=0}^{n}\binom{n}{k}x^{k}=1+nx+\sum_{k=2}^{n}\binom{n}{k}x^{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-704748a00ca9dd15258a651939f9d97d_l3.png "Rendered by QuickLaTeX.com")
En revanche, pour ![x\in\left]0,1\right[](https://math-os.com/wp-content/ql-cache/quicklatex.com-2b8627a8b04d5de8b74e849039de8e99_l3.png "Rendered by QuickLaTeX.com") , les termes cette somme sont de signe alterné et le signe de
, les termes cette somme sont de signe alterné et le signe de  ne saute pas aux yeux.
ne saute pas aux yeux.
BIJECTION
Une bijection d’un ensemble vers un ensemble  est, en quelque sorte, une « correspondance parfaite » entre ces deux ensembles.
est, en quelque sorte, une « correspondance parfaite » entre ces deux ensembles.
Intuitivement, cela signifie que :
- de chaque élément de part une unique flèche vers un élément de ,
- vers chaque élément de parvient une unique flèche provenant d’un élément de .
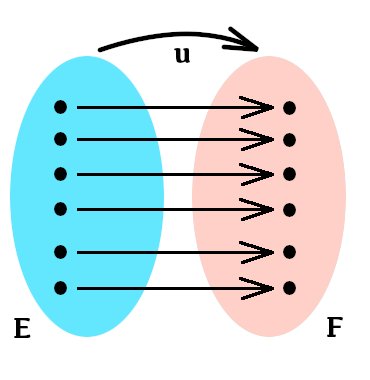
De manière précise, une bijection est une application  à la fois injective et surjective.
à la fois injective et surjective.
➢ L’injectivité signifie que tout élément de possède au plus un antécédent par  .
.
➢ La surjectivité signifie que tout élément de possède au moins un antécédent par .
La superposition des deux conditions signifie que tout élément de possède un unique antécédent par . En symboles :
![\[\forall y\in F,\exists !x\in E;\,u(x)=y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6c27834984906712939a5f87a702e6b8_l3.png "Rendered by QuickLaTeX.com")
Chacune des applications suivantes est un exemple de bijection :
![\[f:\{0,1,2\}\to\{0,2,4\},n\mapsto 2n\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bbd2fb126b07759a9d04b652984657f4_l3.png "Rendered by QuickLaTeX.com")
![\[g:\mathbb{N}\to\mathbb{N}^\star,n\mapsto n+1\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-18c40404c5932f4c5f3745508576c7f8_l3.png "Rendered by QuickLaTeX.com")
![\[h:\mathbb{N}\to\mathbb{Z},n\mapsto\left\{\begin{matrix}\frac{n}{2} & \text{si }n\text{ est pair}\\\\-\frac{n+1}{2} & \text{sinon}\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bec1d9f2474d03063c71846115346a03_l3.png "Rendered by QuickLaTeX.com")
S’il existe une bijection , alors il existe une bijection de  (à commencer par la bijection réciproque de , notée
(à commencer par la bijection réciproque de , notée  , qui a tout élément de associe son unique antécédent par ). On peut donc parler d’ensembles « en bijection », sans préciser d’ensemble de départ ni d’arrivée : deux tels ensembles sont dits équipotents. Dans le cas de deux ensembles finis, cela signifie simplement que les deux ensembles ont le même cardinal.
, qui a tout élément de associe son unique antécédent par ). On peut donc parler d’ensembles « en bijection », sans préciser d’ensemble de départ ni d’arrivée : deux tels ensembles sont dits équipotents. Dans le cas de deux ensembles finis, cela signifie simplement que les deux ensembles ont le même cardinal.
Les exemples ci-dessus montrent que  et
et  sont équipotents à
sont équipotents à  . On peut montrer que c’est aussi le cas de
. On peut montrer que c’est aussi le cas de  : pour cette raison, , et sont dits dénombrables. On peut montrer que
: pour cette raison, , et sont dits dénombrables. On peut montrer que  , en revanche, n’est pas dénombrable.
, en revanche, n’est pas dénombrable.
BINOMIAUX (coefficients)
Si  sont deux entiers naturels, on note
sont deux entiers naturels, on note  le nombre de parties de cardinal
le nombre de parties de cardinal  dans un ensemble de cardinal
dans un ensemble de cardinal 
Cet entier est évidemment nul si  Et sinon, on peut montrer que :
Et sinon, on peut montrer que :
![\[\binom{n}{k}=\frac{n!}{k!\left(n-k\right)!}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-454d46cd5d1ef507adca3cb904a878e9_l3.png "Rendered by QuickLaTeX.com")
 cette formule peut s’écrire, après simplification par
cette formule peut s’écrire, après simplification par  :
: ![\[\binom{n}{k}=\frac{n\left(n-1\right)\cdots\left(n-k+1\right)}{k!}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ed5be20eb3bda80310e0ecc0254a73ec_l3.png "Rendered by QuickLaTeX.com")
sont appelés coefficients binomiaux, car ils interviennent dans la célèbre formule du binôme de Newton : ![\[\left(a+b\right)^{n}=\sum_{k=0}^{n}\binom{n}{k}a^{n-k}b^{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5e1e24e87f731777d81990331fd47bf2_l3.png "Rendered by QuickLaTeX.com")
 sont deux nombres complexes.
sont deux nombres complexes.
Plus généralement, cette égalité reste valable dans un anneau, pour tout couple  d’éléments qui commutent. On peut notamment l’appliquer à une couple de matrices carrées de même taille, à coefficients dans un même corps
d’éléments qui commutent. On peut notamment l’appliquer à une couple de matrices carrées de même taille, à coefficients dans un même corps  .
.
Il existe de nombreuses formules faisant intervenir les coefficients binomiaux. Quelques unes des plus importantes son détaillées dans cet article.
Les coefficients binomiaux généralisés sont définis, pour tout  par :
par :
![\[\binom{\alpha}{k}=\frac{\alpha\left(\alpha-1\right)\cdots\left(\alpha-k+1\right)}{k!}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4de8d3354271f817a8eecc3da29f1f0e_l3.png "Rendered by QuickLaTeX.com")
![\[\forall t\in\left]-1,1\right[,\:\left(1+t\right)^{\alpha}=\sum_{k=0}^{\infty}\binom{\alpha}{k}t^{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ba0eea2ec5eea47696ebcbe818a09dfb_l3.png "Rendered by QuickLaTeX.com")
BOLZANO-WEIERSTRASS (théorème de)
Une suite réelle  ne possède pas nécessairement de valeurs d’adhérence, comme on le voit en considérant la suite croissante des entiers naturels.
ne possède pas nécessairement de valeurs d’adhérence, comme on le voit en considérant la suite croissante des entiers naturels.
C’est toutefois le cas si la suite considérée est supposée bornée. Ce résultat constitue le théorème de Bolzano-Weierstrass.
En voici deux esquisses de preuve …
1 – Par dichotomie. Par hypothèse, il existe des réels  tels que
tels que ![x_n\in\left[a,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f44a0a6d6426ecf449f234774908a6e9_l3.png "Rendered by QuickLaTeX.com") pour tout
pour tout  Notons
Notons  L’un au moins des deux segments
L’un au moins des deux segments ![\left[a,m\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b059e56f186e459aca39b27bb82e4c5b_l3.png "Rendered by QuickLaTeX.com") ou
ou ![\left[m,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b032cde310eddbeecf773bb1e5a65303_l3.png "Rendered by QuickLaTeX.com") contient
contient  pour une infinité d’indices (tout simplement parce que l’union de deux ensembles finis est un ensemble fini !). En répétant cet argument, on construit par récurrence une suite
pour une infinité d’indices (tout simplement parce que l’union de deux ensembles finis est un ensemble fini !). En répétant cet argument, on construit par récurrence une suite  de segments tels que :
de segments tels que :

 (plus précisément :
(plus précisément :  ,
,- l’ensemble
 est infini pour tout .
est infini pour tout .
La propriété des segments emboîtés s’applique et montre que  est un singleton
est un singleton 
On vérifie que  est la limite d’une suite extraite de
est la limite d’une suite extraite de  autrement dit : une valeur d’adhérence de cette suite.
autrement dit : une valeur d’adhérence de cette suite.
2 – Via le lemme des pics. Ce résultat un peu technique dit que de toute suite réelle, on peut extraire une sous-suite monotone. Il fait l’objet de l’exercice n° 9 de cette fiche. On se donne alors une suite réelle bornée; on en extrait (grâce au lemme des pics) une sous-suite monotone, qui est évidemment bornée donc convergente (d’après le théorème de la limite monotone).
On peut aussi voir les choses de plus haut : le théorème de Bolzano-Weierstrass exprime la compacité séquentielle relative des parties bornées de 
Si l’on considère plus généralement une suite  à termes dans un espace métrique, alors l’ensemble de ses valeurs d’adhérence est :
à termes dans un espace métrique, alors l’ensemble de ses valeurs d’adhérence est :
![\[ V=\bigcap_{n=0}^{\infty}\overline{X_{n}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8133bc1ce7281e2361836c85df0599c0_l3.png "Rendered by QuickLaTeX.com")
 désigne l’ensemble
désigne l’ensemble 
On voit ainsi que  est fermé (en tant qu’intersection d’une famille de fermés).
est fermé (en tant qu’intersection d’une famille de fermés).
Maintenant, si la suite considérée est à termes dans un espace vectoriel normé de dimension finie, alors apparaît comme l’intersection d’une suite décroissante de compacts non vides, ce qui prouve que 
BORNÉ
La notion de partie bornée est présentée ici dans par souci de simplicité. Son cadre naturel est celui des espaces métriques.
On dit qu’une partie  de est bornée lorsque :
de est bornée lorsque :
![\[\exists M\in\mathbb{R}^{+},\thinspace\forall x\in B,\thinspace\left|x\right|\leqslant M\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-07dc992276fd76f50c615a58536d6b2a_l3.png "Rendered by QuickLaTeX.com")
tels que et ![B\subset\left[a,b\right].](https://math-os.com/wp-content/ql-cache/quicklatex.com-69982ea861477d7a71de59dc09348bc9_l3.png "Rendered by QuickLaTeX.com")
Il est facile de voir que :
- l’intersection d’une famille de parties bornées est bornée.
- l’union d’une famille finie de parties bornées est bornée.
Parmi les parties bornées de  on peut distinguer :
on peut distinguer :
- les intervalles bornés. Ce sont ceux de l’une des formes suivantes :
![\[\emptyset,\:\left\{ a\right\} ,\:\left[a,b\right],\:\left[a,b\right[,\:\left]a,b\right],\:\left]a,b\right[\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-af73c9696df74776ea8ae2400c78b4f6_l3.png "Rendered by QuickLaTeX.com")
- les parties fermées et bornées. Pour une telle partie , on peut extraire de toute suite à termes dans une sous-suite convergente dont la limite appartient à
 La réciproque est vraie : toute partie de ayant cette propriété est fermée et bornée. En d’autres termes, les parties fermées et bornées de sont exactement les parties compactes de .
La réciproque est vraie : toute partie de ayant cette propriété est fermée et bornée. En d’autres termes, les parties fermées et bornées de sont exactement les parties compactes de .
A l’intersection des deux catégories 1 et 2 ci-dessus, on trouve les segments (intervalles fermés et bornés).
Maintenant, si  alors une application
alors une application  est dite bornée lorsque
est dite bornée lorsque  est une partie bornée au sens précédent. Cela signifie donc qu’il existe
est une partie bornée au sens précédent. Cela signifie donc qu’il existe  tel que :
tel que :
![\[\forall x\in D,\thinspace\left|f\left(x\right)\right|\leqslant M\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e232c0a01c436955e67e709a5b01dcb4_l3.png "Rendered by QuickLaTeX.com")