
L’objet de cette note est de répondre à une question récemment posée par deux de mes étudiants de MPSI (promotion 2025-26).
1 – Le contexte
Nous venions de traiter en classe l’exercice suivant, qui est très classique :
Exercice
On considère le  espace vectoriel
espace vectoriel  des applications continues de
des applications continues de ![\left[0,1\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-beb10f64e7f6b1b271629e3a8291d2e5_l3.png "Rendered by QuickLaTeX.com") dans
dans  que l’on munit du produit scalaire défini par :
que l’on munit du produit scalaire défini par :
![\[\forall\left(f,g\right)\in E^{2},\thinspace\left(f\mid g\right)=\int_{0}^{1}f\left(t\right)g\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-90254f0d40e97c3328e6682efe9406f5_l3.png "Rendered by QuickLaTeX.com")
 » , notée
» , notée  :
: ![\[\forall f\in E,\thinspace L\left(f\right)=f\left(0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e51fd9a5bc7cdb4c3e65cf096db42f8f_l3.png "Rendered by QuickLaTeX.com")
 pour laquelle
pour laquelle  c’est-à-dire pour laquelle :
c’est-à-dire pour laquelle : ![\[\forall f\in E,\thinspace f\left(0\right)=\int_{0}^{1}a\left(t\right)f\left(t\right)\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b8c00695108e6129964cbafe3a0dac9e_l3.png "Rendered by QuickLaTeX.com")
Cet exercice se présente naturellement dans un cours sur les espaces préhilbertiens réels. On démontre en effet le résultat fondamental suivant :
Théorème de réprésentation des formes linéaire
Soit  un espace vectoriel euclidien (donc : de dimension finie, muni d’un produit scalaire). Alors l’application
un espace vectoriel euclidien (donc : de dimension finie, muni d’un produit scalaire). Alors l’application
![\[J:V\rightarrow\mathcal{L}\left(V,\mathbb{R}\right),\thinspace a\mapsto\left(a\mid\cdot\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d7f5004674d72e4261ad895fa916ee31_l3.png "Rendered by QuickLaTeX.com")
Ce théorème est facile à établir :
- L’application
 est d’évidence linéaire (en raison de la bilinéarité du produit scalaire).
est d’évidence linéaire (en raison de la bilinéarité du produit scalaire). - Si
 est la forme linéaire nulle, alors en particulier
est la forme linéaire nulle, alors en particulier  d’où
d’où  Ainsi est injective.
Ainsi est injective. - D’après le corollaire du théorème du rang, est aussi surjective : c’est un isomorphisme.
Cet isomorphisme est parfois qualifié de « canonique », ce qui signifie qu’on peut le décrire sans faire référence à aucune base : la seule existence préalable du produit scalaire permet de construire  Telle n’est pas la situation en général : si
Telle n’est pas la situation en général : si  sont deux espaces vectoriels « abstraits » de même dimension finie
sont deux espaces vectoriels « abstraits » de même dimension finie  alors la seule manière de construire un isomorphisme
alors la seule manière de construire un isomorphisme  consiste précisément à choisir une base
consiste précisément à choisir une base  de
de  une base
une base  de
de  et à considérer l’unique application linéaire
et à considérer l’unique application linéaire  telle que
telle que  Un tel isomorphisme est alors « non-canonique », au sens précédent.
Un tel isomorphisme est alors « non-canonique », au sens précédent.
Signalons aussi que ce théorème est une version particulière (limitée à la dimension finie) du célèbre théorème de représentation de Riesz, selon lequel les seules formes linéaires continues sur un espace de Hilbert  sont les
sont les  pour
pour  Le théorème de Riesz montre que tout espace de Hilbert est canoniquement isomorphe à son dual topologique (c’est-à-dire : l’espace des formes linéaires continues sur
Le théorème de Riesz montre que tout espace de Hilbert est canoniquement isomorphe à son dual topologique (c’est-à-dire : l’espace des formes linéaires continues sur  et, de plus, que cet isomorphisme est isométrique.
et, de plus, que cet isomorphisme est isométrique.
Passons à la résolution de l’exercice.
2 – L’exercice
Cet exercice fournit un exemple de forme linéaire sur un espace préhilbertien de dimension infinie, qui n’est pas du type 
On va raisonner par l’absurde et supposer l’existence de vérifiant :
( )
) ![\[\forall f\in E,\thinspace\int_{0}^{1}a\left(t\right)\thinspace f\left(t\right)\thinspace dt=f\left(0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7b7121fc1a02e69368731cd79e390ec8_l3.png "Rendered by QuickLaTeX.com")
![\[f:\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto t\thinspace a\left(t\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b97df716c35d810ae62c716bf9b4ba62_l3.png "Rendered by QuickLaTeX.com")
![\[\int_{0}^{1}t\thinspace a\left(t\right)^{2}\thinspace dt=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-29b827249d19e3b1de924295caba524c_l3.png "Rendered by QuickLaTeX.com")
![\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto t\thinspace a\left(t\right)^{2}](https://math-os.com/wp-content/ql-cache/quicklatex.com-7a7f933048ff92e7d7e28356d26926d8_l3.png "Rendered by QuickLaTeX.com") étant continue, positive et d’intégrale nulle doit être identiquement nulle, ce qui impose
étant continue, positive et d’intégrale nulle doit être identiquement nulle, ce qui impose ![\forall t\in\left]0,1\right],\thinspace a\left(t\right)=0](https://math-os.com/wp-content/ql-cache/quicklatex.com-c8acde043628573ef134552ee3d45c58_l3.png "Rendered by QuickLaTeX.com") et finalement
et finalement  (par continuité de
(par continuité de  en
en  Mais ceci est absurde car toute application continue sur devrait alors s’annuler en …
Mais ceci est absurde car toute application continue sur devrait alors s’annuler en …
Cette solution percutante n’est pas la seule. Voici un autre point de vue …
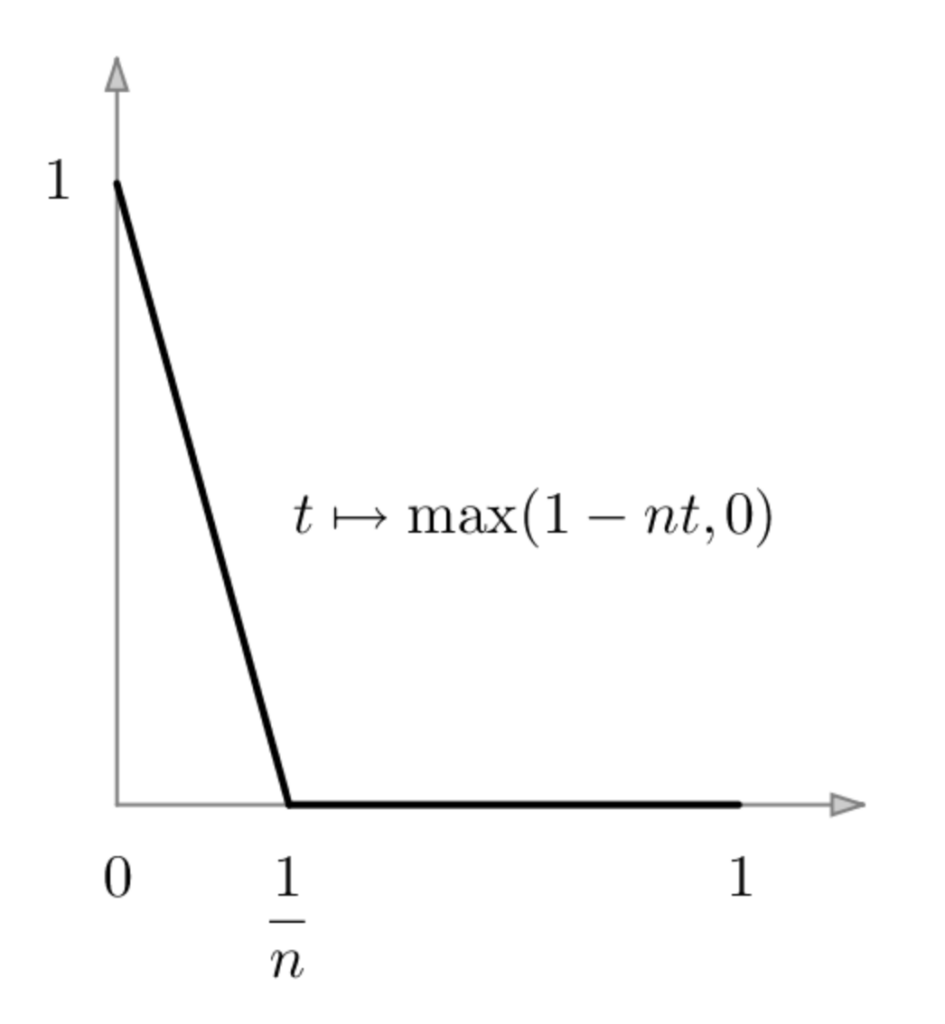
Considérons la suite d’applications  avec, pour tout
avec, pour tout  :
:
![\[ f_{n}:\left[0,1\right]\rightarrow\mathbb{R},\thinspace t\mapsto\max\left(1-nt,\thinspace0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-74409091974fea52325d3f7499f7aeb4_l3.png "Rendered by QuickLaTeX.com")
 est représentée ci-dessous :
est représentée ci-dessous :
S’il existait vérifiant  on aurait en particulier :
on aurait en particulier :
![\[\forall n\in\mathbb{N}^{\star},\thinspace\int_{0}^{1}a\left(t\right)\thinspace\max\left(1-nt,0\right)\thinspace dt=1\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0ecf9decab557f43637e7fb477eab77c_l3.png "Rendered by QuickLaTeX.com")
![\[\left|\int_{0}^{1}a\left(t\right)\thinspace\max\left(1-nt,0\right)\thinspace dt\right|\leqslant\int_{0}^{1/n}\left|a\left(t\right)\right|\thinspace dt\leqslant\dfrac{1}{n}\left\Vert a\right\Vert _{\infty}\underset{n\rightarrow+\infty}{\longrightarrow}0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b30603c7974d3d659fada5a7582adb21_l3.png "Rendered by QuickLaTeX.com")
Remarque
On observe au passage que la forme linéaire  est discontinue ( étant muni de la norme euclidienne); en effet :
est discontinue ( étant muni de la norme euclidienne); en effet :
![\[\dfrac{\left|L\left(f_{n}\right)\right|}{\left\Vert f_{n}\right\Vert }=\dfrac{1}{\sqrt{\int_{0}^{1/n}\left(1-nt\right)^{2}\thinspace dt}}=3n\longrightarrow+\infty\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-872642e27cbf67ea77fc0bb08b2f4e82_l3.png "Rendered by QuickLaTeX.com")
Venons-en maintenant à la question posée par mes étudiants.
3 – La question
On considère toujours l’espace ![E=\mathcal{C}\left(\left[0,1\right],\mathbb{R}\right)](https://math-os.com/wp-content/ql-cache/quicklatex.com-333fed2cf526a8f654e4915b351640a6_l3.png "Rendered by QuickLaTeX.com") ainsi que la forme linéaire
ainsi que la forme linéaire  mais on se permet de modifier le produit scalaire en vigueur sur
mais on se permet de modifier le produit scalaire en vigueur sur 
Question
Existe-t-il un produit scalaire sur et une application tels que  ?
?
De manière étonnante, la réponse est affirmative !
Il suffit de poser, pour tout  :
:
![\[\varphi\left(f,g\right)=f\left(0\right)g\left(0\right)+\int_{0}^{1}\left[f\left(t\right)-f\left(0\right)\right]\left[g\left(t\right)-g\left(0\right)\right]\thinspace dt\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-516daa45f9d9b2ad9a2ddf2f3d40c420_l3.png "Rendered by QuickLaTeX.com")
ainsi définie est d’évidence une forme bilinéaire symétrique positive sur En outre, si  c’est-à-dire si
c’est-à-dire si ![f\left(0\right)^{2}+\int_{0}^{1}\left[f\left(t\right)-f\left(0\right)\right]^{2}\thinspace dt=0,](https://math-os.com/wp-content/ql-cache/quicklatex.com-3a7b2be816fec8ecd110b3cfa4771b4d_l3.png "Rendered by QuickLaTeX.com") alors
alors  et
et  donc
donc 
Puis, en choisissant pour l’application constante  on constate que :
on constate que :
![\[\forall f\in E,\thinspace\varphi\left(a,f\right)=f\left(0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-af9997679b9d8992de6c6061e992056f_l3.png "Rendered by QuickLaTeX.com")

4 – Généralisation
Ce qui s’est produit à la section précédente n’est pas un phénomène isolé. En réalité, étant donnés un espace vectoriel et une forme linéaire sur on peut toujours trouver un produit scalaire « ad hoc » (d’où le titre de cette note …) sur ainsi qu’un vecteur  tels que
tels que 
Si est la forme linéaire nulle, il n’y a rien à démontrer (tout produit scalaire convient et l’on choisit  Supposons donc
Supposons donc 
Le noyau de est un hyperplan de  Choisissons un vecteur tel que
Choisissons un vecteur tel que  Comme
Comme  on sait que :
on sait que :
![\[V=\ker\left(L\right)\oplus\mathbb{R}a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-62c82bfd26d6bd0097ecfdc358e11409_l3.png "Rendered by QuickLaTeX.com")
 sur
sur 
Pour tout  on peut décomposer
on peut décomposer  et
et  selon la somme directe :
selon la somme directe :
![\[f=x+\lambda a,\qquad g=y+\mu a\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8d83ac1c663065fd6f733111159e4d2d_l3.png "Rendered by QuickLaTeX.com")
 et
et  On définit alors un produit scalaire sur en posant :
On définit alors un produit scalaire sur en posant : ![\[\varphi\left(f,g\right)=\psi\left(x,y\right)+\lambda\mu\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4715f53d108d20f9ecc7a57fcc329b79_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[\varphi\left(a,f\right)=\psi\left(0_{V},x\right)+1\times\lambda=\lambda=L\left(x\right)+\lambda\thinspace L\left(a\right)=L\left(x+\lambda a\right)=L\left(f\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-73deb4d395dfb5986c5d07e803c376f9_l3.png "Rendered by QuickLaTeX.com")
![\[\varphi\left(a,\cdot\right)=L\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-59de863d46c38be26a5e47e218f552bf_l3.png "Rendered by QuickLaTeX.com")
5 – Un dernier mot
En examinant attentivement la preuve ci-dessus, on observe qu’elle repose notamment sur l’existence, pour tout espace vectoriel d’un produit scalaire sur
Cette existence ne soulève aucune difficulté en dimension finie. En effet, étant donnée une base  de il suffit de poser pour tout
de il suffit de poser pour tout  :
:
![\[\varphi\left(x,y\right)=\sum_{i=1}^{n}x_{i}y_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c685cc9c8502d243dc7e7eaad73c4bc7_l3.png "Rendered by QuickLaTeX.com")

 (resp.
(resp.  désigne la
désigne la  ème coordonnée de
ème coordonnée de  (resp. de
(resp. de  dans
dans 
Mais en dimension infinie, ce n’est plus aussi simple : on a besoin de l’axiome du choix !
Avec l’axiome du choix, on démontre l’existence d’une « base de Hamel », c’est-à-dire d’une famille  de vecteurs de telle que tout
de vecteurs de telle que tout  puisse s’écrire, de manière unique, comme une combinaison linéaire d’un nombre FINI des
puisse s’écrire, de manière unique, comme une combinaison linéaire d’un nombre FINI des  On formule généralement cela en disant que tout peut s’écrire, d’une seule façon, sous la forme :
On formule généralement cela en disant que tout peut s’écrire, d’une seule façon, sous la forme :
![\[x=\sum_{i\in I}x_{i}e_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ecc21a84f3daaafcb279a4ea5ec2f0f6_l3.png "Rendered by QuickLaTeX.com")
 est une famille PRESQUE NULLE de réels (il existe une partie finie de
est une famille PRESQUE NULLE de réels (il existe une partie finie de  telle que
telle que 
Il suffit alors de poser, pour tout :
![\[\varphi\left(x,y\right)=\sum_{i\in I}x_{i}y_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6e431f6f9bd447276caa2c893d5324c5_l3.png "Rendered by QuickLaTeX.com")
Merci pour ce bel article !
Très accessible et intéressant
Super article, et assez accessible pour que je me sois motivé à sortir une feuille et un crayon pour tout démontrer car je sentais que c’était trouvable 🙂 Et les ouvertures sur les théorèmes plus généraux ça donne des idées pour des applications dans d’autres contextes.
Merci Robin ! Voilà un type d’interaction qui me semble idéal : un ancien élève commente un article élaboré à la suite d’une question posée par des élèves actuels 😉