
Cet article s’adresse à celles et ceux qui s’intéressent aux questions d’algèbre linéaire et donc – entre autres – aux étudiants des deux premières années d’enseignement supérieur scientifique.
Dans un cours d’algèbre linéaire, on aborde notamment la question des espaces vectoriels de dimension finie. On y explique que si  est un corps (le plus souvent un sous-corps de
est un corps (le plus souvent un sous-corps de  et si
et si  est un
est un  espace vectoriel possédant une famille finie et génératrice de , alors on peut trouver une telle famille qui soit de plus libre, et qui constitue donc une base de
espace vectoriel possédant une famille finie et génératrice de , alors on peut trouver une telle famille qui soit de plus libre, et qui constitue donc une base de 
En outre, toutes les bases de sont composées d’un même nombre de vecteurs. Cet entier est appelé la dimension de et noté 
Cette construction théorique n’est pas traitée ici, mais vous pouvez en découvrir tous les détails en visionnant cette vidéo et les suivantes.
Ce texte essaie de rassembler les principales méthodes qui permettent, en pratique, de calculer la dimension d’un espace vectoriel. Chacune de ces méthodes est illustrée d’exemples. Bonne lecture 🙂
1 – Intuitivement, la dimension … c’est quoi ?
De façon naïve, la dimension d’un espace vectoriel est le « nombre de degrés de liberté » dont on dispose pour s’y déplacer.
Si l’espace en question est une droite, on repère la position d’un point par son abscisse, après avoir choisi une origine et un vecteur unité. S’il s’agit d’un plan, deux nombres sont nécessaires : une abscisse et une ordonnée.
Dans l’espace usuel, on peut repérer la position d’un point par trois nombres : une abscisse X, une ordonnée Y et une côte Z.
Illustration dynamique 1
Modifier la position de l’observateur en pressant SHIFT →↑↓←.
Zoomer / dézoomer en utilisant les touches P / M.
Les sliders contrôlent les coordonnées cartésiennes du centre de la petite sphère.
Mais ce n’est pas la seule façon de s’y prendre. Par exemple, la position d’un point au voisinage de la terre peut être repérée par une latitude, une longitude et une altitude : là encore, trois nombres.
Illustration dynamique 2
Modifier la position de l’observateur en pressant SHIFT →↑↓←.
Zoomer / dézoomer en utilisant les touches P / M.
Les sliders contrôlent les coordonnées sphériques du centre de la petite sphère.
D’ailleurs, ce concept s’étend bien au-delà des espaces vectoriels (ou affines). Une sphère, par exemple, doit être considérée comme un espace de dimension 2 : par temps calme, la surface d’un océan ressemble (comme deux gouttes d’eau … il fallait oser) à un plan; tout au moins à une échelle appropriée.
Ces images mentales peuvent aider à se faire une idée intuitive de la notion de dimension.
Revenons maintenant au cadre formel des espaces vectoriels.
2 – Compter les vecteurs d’une base
Règle A
Soient un espace vectoriel et  .
.
Si  est une base de
est une base de  alors
alors 
Ceci provient simplement de la définition de  mentionnée dans introduction.
mentionnée dans introduction.
Voici quelques exemples d’utilisation de cette règle.
Exemple A-1
Pour tout  :
:
![\[\boxed{\dim\left(\mathbb{K}^{n}\right)=n}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-863f08ac620da6da3803268788aa3b68_l3.png "Rendered by QuickLaTeX.com")
En effet, on voit aisément (cf. détail ci-dessous) qu’en notant pour tout
 :
:
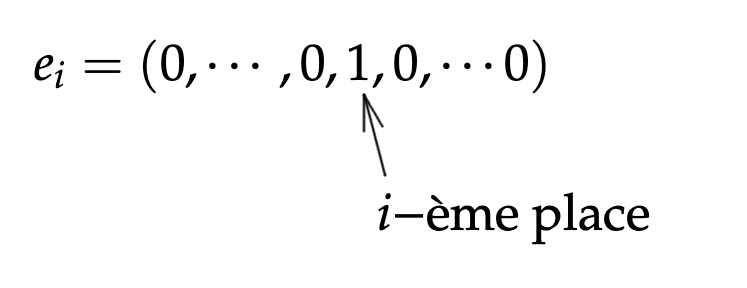
la famille est une base de  (officiellement appelée la base canonique de
(officiellement appelée la base canonique de 
– Détail –
Choisissons  C’est suffisant pour comprendre. Tout vecteur de
C’est suffisant pour comprendre. Tout vecteur de  s’écrit sous la forme :
s’écrit sous la forme :

ce qui prouve que la famille :
![\[\beta=\left(\left(1,0,0\right),\left(0,1,0\right),\left(0,0,1\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d924294c9f59bb89fc24799536827c8c_l3.png "Rendered by QuickLaTeX.com")

Elle est de plus libre; en effet, si  sont trois scalaires tels que :
sont trois scalaires tels que :
![\[x\left(1,0,0\right)+y\left(0,1,0\right)+z\left(0,0,1\right)=\left(0,0,0\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f29e6aca3af4bae610be32a061c2d8fa_l3.png "Rendered by QuickLaTeX.com")

Finalement,  est une base de La généralisation à
est une base de La généralisation à  quelconque est immédiate.
quelconque est immédiate.
Exemple A-2
Considérons deux réels  ainsi que l’ensemble :
ainsi que l’ensemble :
![\[F=\left\{ \left(x,y,z\right)\in\mathbb{R}^{3},\thinspace z=ax+by\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f9f165dd3f0afd9aff6b261800030896_l3.png "Rendered by QuickLaTeX.com")
 (en effet,
(en effet,  contient visiblement le triplet nul et est stable par combinaison linéaire).
contient visiblement le triplet nul et est stable par combinaison linéaire).
Les vecteurs de sont les triplets de la forme :

 et
et  appartiennent à et tout vecteur de est combinaison linéaire de ces deux-là. La famille
appartiennent à et tout vecteur de est combinaison linéaire de ces deux-là. La famille  est donc génératrice de
est donc génératrice de  Comme elle libre (évident), c’est une base de et donc :
Comme elle libre (évident), c’est une base de et donc : ![\[\boxed{\dim\left(F\right)=2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e8bddfe6d77c566c63fe9a3c6c3eff23_l3.png "Rendered by QuickLaTeX.com")
et si  ne sont pas simultanément nuls, alors l’ensemble :
ne sont pas simultanément nuls, alors l’ensemble : ![\[H=\left\{ \left(x_{1},\cdots,x_{n}\right)\in\mathbb{K}^{n};\thinspace\sum_{k=1}^{n}\lambda_{k}x_{k}=0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-981204ca2bdcba76c729b939db4187f3_l3.png "Rendered by QuickLaTeX.com")
et : ![\[\boxed{\dim\left(H\right)=n-1}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4aa5fbfc358c9e2e7a84136a73c3a4fb_l3.png "Rendered by QuickLaTeX.com")
 formée de
formée de  vecteurs. Il est toutefois beaucoup plus simple de voir comme le noyau de la forme linéaire non nulle
vecteurs. Il est toutefois beaucoup plus simple de voir comme le noyau de la forme linéaire non nulle ![\[\mathbb{K}^{n}\rightarrow\mathbb{K},\thinspace\left(x_{1},\cdots,x_{n}\right)\mapsto\sum_{k=1}^{n}\lambda_{k}x_{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c7877d9742efeb32c9333523d9c86d2e_l3.png "Rendered by QuickLaTeX.com")
Exemple A-3
Etant donnés deux entiers  l’ensemble
l’ensemble  des matrices rectangulaires à lignes et
des matrices rectangulaires à lignes et  colonnes et à termes dans est un espace vectoriel.
colonnes et à termes dans est un espace vectoriel.
Notons  la matrice de format
la matrice de format  dont les termes sont tous nuls, à l’exception de celui situé à l’intersection de la ligne
dont les termes sont tous nuls, à l’exception de celui situé à l’intersection de la ligne  et de la colonne
et de la colonne  qui vaut 1.
qui vaut 1.
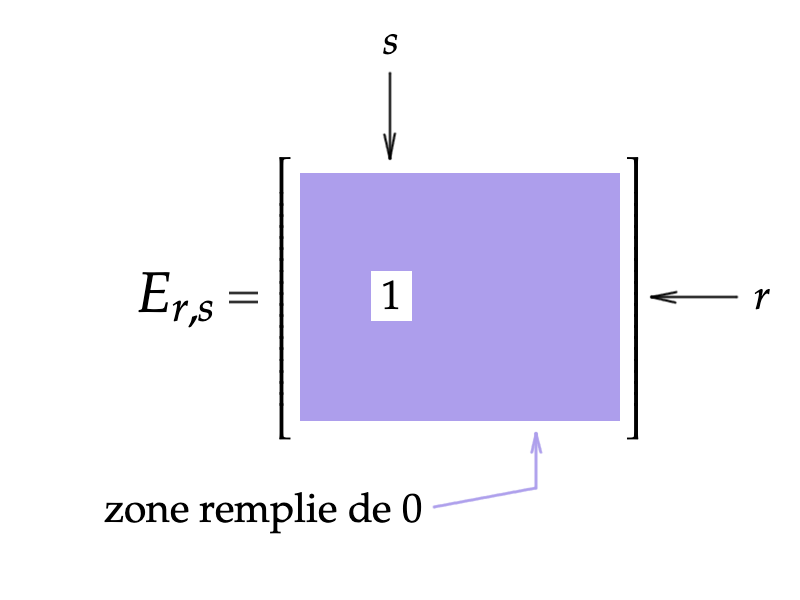
Il est facile de voir que la famille  (ordonnée par exemple selon l’ordre lexicographique sur les couples d’indices) est une base de (c’est la base canonique). En conséquence :
(ordonnée par exemple selon l’ordre lexicographique sur les couples d’indices) est une base de (c’est la base canonique). En conséquence :
![\[\boxed{\dim\left(\mathcal{M}_{n,p}\left(\mathbb{K}\right)\right)=np}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-25abd8a3605a4cdb87f020ee098d9013_l3.png "Rendered by QuickLaTeX.com")
Cet exemple raconte donc essentiellement la même histoire que l’exemple A-1.
Exemple A-4
Soit  Dans l’espace
Dans l’espace  des suites à termes dans
des suites à termes dans  considérons le sous-espace
considérons le sous-espace  des suites
des suites  telles que :
telles que :
![\[ \forall k>n,\:a_{k}=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-23bb8aaa849ad39a3d4cc8bd30c1af89_l3.png "Rendered by QuickLaTeX.com")
est constitué des suites dont tous les termes au-delà du rang sont nuls (vous aurez probablement reconnu l’espace des polynômes à coefficients dans dont le degré inférieur ou égal à  Autrement dit :
Autrement dit : ![E_{n}=\mathbb{K}_{n}\left[X\right],](https://math-os.com/wp-content/ql-cache/quicklatex.com-77eb0c6dac9c199072c72c2cc40fc954_l3.png "Rendered by QuickLaTeX.com") mais c’est sans importance ici).
mais c’est sans importance ici).
Posons, pour tout  :
:
![\[u_{j}=\left(\delta_{j,k}\right)_{k\in\mathbb{N}} \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-df4c07089affd472a5ccd4805316c654_l3.png "Rendered by QuickLaTeX.com")
![\[\delta_{j,k}=\left\{\begin{matrix}1 & \text{si } j=k\\ 0 & \text{sinon}\end{matrix}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fd9c8afd0d69849ca024f81fa2e3262a_l3.png "Rendered by QuickLaTeX.com")
En d’autres termes,  est la suite de scalaires dont tous les termes sont nuls, à l’exception du
est la suite de scalaires dont tous les termes sont nuls, à l’exception du  ème qui vaut 1.
ème qui vaut 1.
La famille  est alors une base de et, de ce fait :
est alors une base de et, de ce fait :
![\[\boxed{\dim\left(E_{n}\right)=n+1}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5cb01d6a74e286b8594df708f4bfa490_l3.png "Rendered by QuickLaTeX.com")
3 – Dimension d’un produit cartésien
Considérons deux espaces vectoriels  L’ensemble des couples
L’ensemble des couples  avec
avec  et
et  est noté
est noté  C’est le produit cartésien de par
C’est le produit cartésien de par
On munit cet ensemble d’une structure de espace vectoriel, en décrétant que :
- pour tout
 et tout
et tout  :
: (S)
![\[\left(x,y\right)+\left(x',y'\right)=\left(x+x',y+y'\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-af62b572d4e7233e313071e3928ec672_l3.png "Rendered by QuickLaTeX.com")
- pour tout
 et tout :
et tout :(P)
![\[\lambda\left(x,y\right)=\left(\lambda x,\thinspace\lambda y\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bc98cd27dd39b91d595f39b5434be65c_l3.png "Rendered by QuickLaTeX.com")
Précisons que le vecteur nul de  est le couple
est le couple 

La notation utilisée dans la formule (S) est abusive, car le symbole  est utilisé pour désigner trois opérations a priori distinctes :
est utilisé pour désigner trois opérations a priori distinctes :
- l’addition dans ,
- l’addition dans ,
- l’addition dans
Il est essentiel d’en être conscient(e). Sans compter que, dans ce contexte, le symbole désignera aussi l’addition dans …
Et l’on pourrait formuler une remarque similaire pour la formule (P).
Cela dit, énonçons la :
Règle B
Si  sont de dimensions finies, alors aussi et :
sont de dimensions finies, alors aussi et :
![\[\dim\left(E\times F\right)=\dim\left(E\right)+\dim\left(F\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-12cee96eb20b742b9ff7726e67ac1de5_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Notons  et
et  Si l’on considère une base
Si l’on considère une base  de ainsi qu’une base
de ainsi qu’une base  de
de  alors la famille :
alors la famille :
![\[B=\left(\left(e_{1},0_{F}\right),\cdots,\left(e_{p},0_{F}\right),\left(0_{E},f_{1}\right),\cdots,\left(0_{E},f_{n}\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-927f3294ddf561c2369a60f89bc82cb9_l3.png "Rendered by QuickLaTeX.com")
On vérifie en effet que  est libre et génératrice de :
est libre et génératrice de :
➢ LIBRE car si  sont des scalaires vérifiant :
sont des scalaires vérifiant :
![\[\lambda_{1}\left(e_{1},0_{F}\right)+\cdots+\lambda_{p}\left(e_{p},0_{F}\right)+\mu_{1}\left(0_{E},f_{1}\right)+\cdots+\mu_{n}\left(0_{E},f_{n}\right)=\left(0_{E},0_{F}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6f069f49d9cf932dc38b7ed60cda0538_l3.png "Rendered by QuickLaTeX.com")
![\[\left(\sum_{i=1}^{p}\lambda_{i}e_{i},\thinspace\sum_{j=1}^{n}\mu_{j}f_{j}\right)=\left(0_{E},0_{F}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f12830b8355f6757a5a89f9a1cb4ea24_l3.png "Rendered by QuickLaTeX.com")
![\[\sum_{i=1}^{p}\lambda_{i}e_{i}=0_{E}\qquad\text{et}\qquad\sum_{j=1}^{n}\mu_{j}f_{j}=0_{F}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-27bcb60b72e47a96e4ac56215505790a_l3.png "Rendered by QuickLaTeX.com")
et sont libres, il s’ensuit que :
![\[\forall i\in\left\llbracket 1,p\right\rrbracket ,\thinspace\lambda_{i}=0\qquad\text{et}\qquad\forall j\in\left\llbracket 1,n\right\rrbracket ,\thinspace\mu_{j}=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f9e04b0712fc35482c184ab2438c7a96_l3.png "Rendered by QuickLaTeX.com")
➢ GENERATRICE de car tout vecteur de se présente sous la forme d’un couple avec et  or
or  se décompose dans la base et
se décompose dans la base et  se décompose dans la base :
se décompose dans la base :
![\[x=\sum_{i=1}^{p}x_{i}e_{i}\qquad\text{et}\qquad y=\sum_{j=1}^{n}y_{j}f_{j}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bd28ec01512896ec7e9ed0bdcd999fee_l3.png "Rendered by QuickLaTeX.com")

Remarque
Il en résulte par récurrence que si  et si
et si  sont des espaces vectoriels de dimensions finies, alors il en va de même pour
sont des espaces vectoriels de dimensions finies, alors il en va de même pour  et :
et :
![\[\boxed{\dim\left(\prod_{k=1}^{r}E_{k}\right)=\sum_{k=1}^{r}\dim\left(E_{k}\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bc39dc458d0e579d31c1fd7f54c51d2a_l3.png "Rendered by QuickLaTeX.com")
 est isomorphe (attention : pas égal) à
est isomorphe (attention : pas égal) à 
Exemple B
L’espace  est de dimension
est de dimension 
4 – Utilisation d’un isomorphisme
Règle C
Soient deux espaces vectoriels isomorphes.
Si l’un d’eux est de dimension finie, alors l’autre aussi et leurs dimensions sont égales.
Ce résultat découle du double-lemme suivant :
Double-Lemme
Soient deux espaces vectoriels et soit 
- Si
 est injective, alors transforme toute famille libre de vecteurs de en une famille libre de vecteurs de
est injective, alors transforme toute famille libre de vecteurs de en une famille libre de vecteurs de - Si est surjective, alors transforme tout famille génératrice de en une famille génératrice de
Preuve du double lemme (cliquer pour déployer)
Pour le premier point …
Considérons une famille libre  de vecteurs de et des scalaires
de vecteurs de et des scalaires  tels que :
tels que :
![\[\sum_{i=1}^{r}\lambda_{i}\thinspace u\left(x_{i}\right)=0_{F}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1bbbb660e852fa5a17928b6b5975b1e3_l3.png "Rendered by QuickLaTeX.com")
 on voit que :
on voit que : ![\[\sum_{i=1}^{r}\lambda_{i}\thinspace x_{i}\in\ker\left(u\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d4b24172e7e1681b86cb4c9e37ee3396_l3.png "Rendered by QuickLaTeX.com")
est injective, ceci impose : ![\[\sum_{i=1}^{r}\lambda_{i}x_{i}=0_{E}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-63edb5c9d4b3ccd24890ebee13596f90_l3.png "Rendered by QuickLaTeX.com")
étant libre par hypothèse, on en déduit que  pour tout
pour tout  Ceci montre que la famille
Ceci montre que la famille  est libre.
est libre.
Pour le second point …
Donnons-nous une famille  génératrice de et soit
génératrice de et soit  Comme est surjective, il existe tel que
Comme est surjective, il existe tel que  On peut alors exprimer sous la forme d’une combinaison linéaire des
On peut alors exprimer sous la forme d’une combinaison linéaire des  :
:
![\[\exists\left(\alpha_{1},\cdots,\alpha_{s}\right)\in\mathbb{K}^{s};\thinspace x=\sum_{i=1}^{s}\alpha_{i}e_{i}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2c36484757efaff9274d22d4b72640f7_l3.png "Rendered by QuickLaTeX.com")
: ![\[y=\sum_{i=1}^{s}\alpha_{i}\thinspace u\left(e_{i}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8931d241d5242cf468b9df3a1ebfdcbc_l3.png "Rendered by QuickLaTeX.com")
 est génératrice de
est génératrice de 
Maintenant que notre double-lemme est établi, la règle C devient claire. En effet, si  est un isomorphisme et si est de dimension
est un isomorphisme et si est de dimension  alors une base de est transformée par
alors une base de est transformée par  en une famille libre (parce que est une injection linéaire) et aussi en une famille génératrice de (parce que est une surjection linéaire).
en une famille libre (parce que est une injection linéaire) et aussi en une famille génératrice de (parce que est une surjection linéaire).
Moralité, la famille  est une base de et donc (cf. règle A) :
est une base de et donc (cf. règle A) : 
Ce mécanisme sera utilisé dans chacune des trois sections suivantes.
Mais donnons-en déjà une application significative.
Exemple C-1
Etant donné  intéressons-nous à l’ensemble des suites à termes dans qui vérifient la relation de récurrence :
intéressons-nous à l’ensemble des suites à termes dans qui vérifient la relation de récurrence :
( )
) ![\[\boxed{\forall n\in\mathbb{N},\thinspace u_{n+2}+a\thinspace u_{n+1}+b\thinspace u_{n}=0}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8313aacfff3f121d09698f5f8821bfb6_l3.png "Rendered by QuickLaTeX.com")
est un espace vectoriel de dimension 2.
Pour cela, commençons par observer que si  désigne l’endomorphisme de décalage (le shift, comme on dit outre-manche), c’est-à-dire l’application
désigne l’endomorphisme de décalage (le shift, comme on dit outre-manche), c’est-à-dire l’application
![\[\delta:\mathbb{K}^{\mathbb{N}}\rightarrow\mathbb{K}^{\mathbb{N}},\:\left(u_{0},u_{1},\cdots\right)\mapsto\left(u_{1},u_{2},\cdots\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-47c085446bf345e3a481dace34d386ee_l3.png "Rendered by QuickLaTeX.com")
![\[E=\ker\left(\delta^{2}+a\thinspace\delta+b\thinspace id_{\mathbb{K}^{\mathbb{N}}}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-51c236d2fd7e59f571069121fb14a7bb_l3.png "Rendered by QuickLaTeX.com")
est un sous-espace vectoriel de 
Maintenant, considérons l’application
![\[\Phi:E\rightarrow\mathbb{K}^{2},\thinspace u\mapsto\left(u_{0},u_{1}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-421494fcd7d74b003779939cc51448a1_l3.png "Rendered by QuickLaTeX.com")
 associe, à toute suite vérifiant
associe, à toute suite vérifiant  , le couple de ses deux premiers termes.
, le couple de ses deux premiers termes.
Il est facile (non détaillé) de prouver que est linéaire et bijective. Il en résulte aussitôt que :
![\[\boxed{\dim\left(E\right)=2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2d5106f2e48adf455c0bf29be296fc94_l3.png "Rendered by QuickLaTeX.com")
Remarque
Cet exemple se généralise. Si  et si
et si  alors l’espace des suites
alors l’espace des suites  vérifiant la relation
vérifiant la relation
![\[\forall n\in\mathbb{N},\thinspace u_{n+r}+\sum_{i=0}^{r-1}a_{i}\thinspace u_{n+i}=0\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6cbb1e1a3ffd96c117e1c30d166a18ca_l3.png "Rendered by QuickLaTeX.com")
 Ceci est moralement assez banal : connaître une telle suite équivaut à se donner ses premiers termes (et donc, on dispose de degrés de liberté pour se » déplacer « dans cet espace).
Ceci est moralement assez banal : connaître une telle suite équivaut à se donner ses premiers termes (et donc, on dispose de degrés de liberté pour se » déplacer « dans cet espace).
5 – Dimension d’une somme
Rappelons que si est un espace vectoriel et si  sont deux sous-espaces vectoriels de alors
sont deux sous-espaces vectoriels de alors  désigne l’ensemble des vecteurs de qui sont la somme d’un vecteur de et d’un vecteur de
désigne l’ensemble des vecteurs de qui sont la somme d’un vecteur de et d’un vecteur de  :
:
![\[F+G=\left\{ x+y;\thinspace x\in F\text{ et }y\in G\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bfbc4cad2d865f82ac1950291a0c1565_l3.png "Rendered by QuickLaTeX.com")
s’exprime d’une seule manière sous cette forme, la somme est qualifiée de directe. On la note alors 
Les notations et  désignent donc le même ensemble, mais la seconde indique qu’une condition supplémentaire (jeu de mots) d’unicité est remplie !
désignent donc le même ensemble, mais la seconde indique qu’une condition supplémentaire (jeu de mots) d’unicité est remplie !
Le but de cette section est d’obtenir une formule pour  lorsque et sont de dimensions finies (il n’est pas utile de supposer que la dimension de est finie).
lorsque et sont de dimensions finies (il n’est pas utile de supposer que la dimension de est finie).
Procédons en deux temps.
1ère étape
Supposons la somme directe. Sous cette hypothèse, l’application
![\[\varphi:F\times G\rightarrow F\oplus G,\thinspace\left(f,g\right)\mapsto f+g\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-33c28ed332cb488c7a8697f3f0b647a7_l3.png "Rendered by QuickLaTeX.com")
Détail
Linéarité
Soient 
 et
et  Alors :
Alors :

Bijectivité
Tout vecteur de peut, par définition, s’écrire de façon unique sous la forme  avec
avec  et
et  autrement dit tout élément de l’ensemble d’arrivée de possède un unique antécédent. C’est la définition d’une bijection.
autrement dit tout élément de l’ensemble d’arrivée de possède un unique antécédent. C’est la définition d’une bijection.
Ceci permet d’appliquer la règle B et la règle C : comme  est de dimension finie, alors aussi et les dimensions sont les mêmes. Concluons :
est de dimension finie, alors aussi et les dimensions sont les mêmes. Concluons :
![\[\boxed{\dim\left(F\oplus G\right)=\dim\left(F\right)+\dim\left(G\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c74e38bc8f81ee1c2c6d73ce4d22fe5a_l3.png "Rendered by QuickLaTeX.com")
2ème étape
Dans le cas général, l’idée consiste à se ramener à une somme directe, grâce au lemme suivant.
Lemme
Soient deux sous-espaces vectoriels de
Etant donné un supplémentaire  de
de  dans :
dans :
![\[F+G=F\oplus S\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-80e40bf2e205bb6bdcd68e47521924e8_l3.png "Rendered by QuickLaTeX.com")
Preuve (cliquer pour déplier / replier)
Si  alors il existe
alors il existe  tel que
tel que  Puis comme
Puis comme  il existe
il existe  et
et  tels que
tels que  De ce fait :
De ce fait :
![\[x=\left(f+i\right)+s\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-e0f18d09a5b6585823c052123eda1ecf_l3.png "Rendered by QuickLaTeX.com")
 L’inclusion réciproque est évidente puisque
L’inclusion réciproque est évidente puisque 
Pour finir, la somme  est directe puisque, comme
est directe puisque, comme  :
:
![\[F\cap S=F\cap\left( S\cap G\right)=\subset\left(F\cap G\right)\cap S=\left\{ 0_{E}\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8ea18d74d3bbaa8fb42e8e6c9b478b5e_l3.png "Rendered by QuickLaTeX.com")
On en déduit la :
Règle D (formule de Grassmann)
Soit un espace vectoriel et soient des sous-espaces vectoriels de de dimensions finies. Alors :
![\[\boxed{\dim\left(F+G\right)=\dim\left(F\right)+\dim\left(G\right)-\dim\left(F\cap G\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-ac922678ee04b2f500f54f4e6f569b6e_l3.png "Rendered by QuickLaTeX.com")

Remarque
Cette formule évoque celle donnant le cardinal de l’union de deux ensembles finis. Mais la comparaison s’arrête là …
En effet, étant donnés trois sous-espaces  de dimensions finies, la formule :
de dimensions finies, la formule :

Comme contre-exemple, on peut proposer, pour  :
:
![\[F=\mathbb{R}(1,0)\qquad G=\mathbb{R}(0,1)\qquad H=\mathbb{R}(1,1)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8607994b9c7b0cddd26c7c86e9ccd576_l3.png "Rendered by QuickLaTeX.com")
Exemple D-1
Considérons un espace de dimension finie  et deux hyperplans
et deux hyperplans  et de (ce sont simplement des sous-espaces vectoriels de dimension
et de (ce sont simplement des sous-espaces vectoriels de dimension 
Calculons la dimension de  en distinguant deux cas.
en distinguant deux cas.
➢ cas 1 : 
Il est évident que  puisque
puisque 
➢ cas 2 : 
Aucun des deux hyperplans n’est inclus dans l’autre (une inclusion entraînerait, vue l’égalité des dimensions, que les deux hyperplans sont confondus). Soit  tel que
tel que  La somme
La somme  est alors directe (puisque
est alors directe (puisque  et sa dimension est donc :
et sa dimension est donc :
![\[\dim\left(A+\mathbb{K}b\right)=\dim\left(A\right)+\dim\left(\mathbb{K}b\right)=\left(n-1\right)+1=n\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2f654e2a25c62d012c63238b07b6b41f_l3.png "Rendered by QuickLaTeX.com")
 Mais alors
Mais alors  (puisque
(puisque 
On applique maintenant la formule de Grassmann :
![\[\dim\left(A\cap B\right)=\dim\left(A\right)+\dim\left(A\right)-\dim\left(A+B\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4e805ef1af6418e513115e6ea115a760_l3.png "Rendered by QuickLaTeX.com")

En conclusion, si et sont deux hyperplans d’un espace de dimension alors :
![\[\boxed{\dim\left(A\cap B\right)=\left\{ \begin{array}{cc}n-1 & \text{si }A=B\\n-2 & \text{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-cd847bafd5f624976f3abb91d90857bb_l3.png "Rendered by QuickLaTeX.com")
6 – La formule du rang
Considérons deux espaces vectoriels et une application linéaire
Règle E (théorème du rang)
Si est de dimension finie alors  est aussi de dimension finie et :
est aussi de dimension finie et :
![\[\boxed{\dim\left(E\right)=\dim\left(\ker\left(u\right)\right)+\dim\left(\text{Im}\left(u\right)\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7b0add2ee9c028a7570cd3379a62723a_l3.png "Rendered by QuickLaTeX.com")
 est appelé le rang de
est appelé le rang de  on le note
on le note 
L’égalité ci-dessus porte le nom de formule du rang.
Ce résultat important est démontré dans cet article, auquel vous pouvez vous reporter, si nécessaire.
Exemple E-1
Considérons l’application linéaire :
![\[\begin{array}{cccc}\varphi: & \mathbb{R}^{4} & \rightarrow & \mathbb{R}^{3}\\& \left(x,y,z,t\right) & \mapsto & \left(x+t,y-z,x+y-z+t\right)\end{array}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d4c0449934971edccee5d8a815d2bdd0_l3.png "Rendered by QuickLaTeX.com")
![\[\ker\left(\varphi\right)=\left\{ \left(x,y,z,t\right)\in\mathbb{R}^{4};\thinspace x+t=y-z=x+y-z+t=0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1a9f9cda748b4e42b33a4fa276b96752_l3.png "Rendered by QuickLaTeX.com")
La condition  étant conséquence des deux autres :
étant conséquence des deux autres :

et donc (somme directe de deux droites vectorielle : cf. section 5) :
![\[\dim\left(\ker\left(\varphi\right)\right)=2\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-892220295e73ce45b518c5668d396b18_l3.png "Rendered by QuickLaTeX.com")
![\[\text{rg}\left(\varphi\right)=\dim\left(\mathbb{R}^{4}\right)-2=2\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-fbb2c4a0f98e93e2070da27446475b13_l3.png "Rendered by QuickLaTeX.com")
n’est pas surjective : dans le cas contraire,  serait égal à la dimension de l’espace d’arrivée, c’est-à-dire 3.
serait égal à la dimension de l’espace d’arrivée, c’est-à-dire 3.
Exemple E-2
Considérons un  espace vectoriel de dimension et cherchons la valeur maximale du rang d’un endomorphisme
espace vectoriel de dimension et cherchons la valeur maximale du rang d’un endomorphisme  vérifiant
vérifiant 
Analysons la situation … Si  est un tel endomorphisme, alors
est un tel endomorphisme, alors  donc, en passant aux dimensions :
donc, en passant aux dimensions :
![\[\text{rg}\left(f\right)\leqslant\dim\left(\ker\left(f\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-cf212e4f682e442a06d398ba4dba601a_l3.png "Rendered by QuickLaTeX.com")
![\[\text{rg}\left(f\right)\leqslant n-\text{rg}\left(f\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7fbb5128307d164b8c169cae569ffb1f_l3.png "Rendered by QuickLaTeX.com")
( )
) ![\[\text{rg}\left(f\right)\leqslant\left\lfloor \frac{n}{2}\right\rfloor \]](https://math-os.com/wp-content/ql-cache/quicklatex.com-60853d23aeaef6b4e22a7081550d1e99_l3.png "Rendered by QuickLaTeX.com")
 désigne la partie entière d’un réel
désigne la partie entière d’un réel 
Si l’on construit un endomorphisme vérifiant  et pour lequel
et pour lequel  est une égalité, on aura fini. Et c’est possible …
est une égalité, on aura fini. Et c’est possible …
Soit  une base de . Définissons par sa matrice
une base de . Définissons par sa matrice  dans :
dans :
➤ Si est pair,  :
:
![\[M=\text{diag}\left(\left[\begin{array}{cc}0 & 1\\0 & 0\end{array}\right],\cdots,\left[\begin{array}{cc}0 & 1\\0 & 0\end{array}\right]\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6e6512a275b3d68522ea9c6a7a19d2ce_l3.png "Rendered by QuickLaTeX.com")
blocs diagonaux de taille 2
➤ Si est impair,  :
:
![\[M=\text{diag}\left(\left[\begin{array}{cc}0 & 1\\0 & 0\end{array}\right],\cdots,\left[\begin{array}{cc}0 & 1\\0 & 0\end{array}\right],1\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b8ac8354bb586dc023f5a8d168223f3b_l3.png "Rendered by QuickLaTeX.com")
blocs diagonaux de taille 2 et un bloc de taille 1.
Par exemple :
![\[\text{si }n=4\text{ :}\qquad M=\left[\begin{array}{cccc}0 & 1 & 0 & 0\\0 & 0 & 0 & 0\\0 & 0 & 0 & 1\\0 & 0 & 0 & 0\end{array}\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-3e691fb78caed0583c6c07af92876d43_l3.png "Rendered by QuickLaTeX.com")
![\[\text{si }n=5\text{ :}\qquad M=\left[\begin{array}{ccccc}0 & 1 & 0 & 0 & 0\\0 & 0 & 0 & 0 & 0\\0 & 0 & 0 & 1 & 0\\0 & 0 & 0 & 0 & 0\\0 & 0 & 0 & 0 & 0\end{array}\right]\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2beacac4feb18e7cd08365f361526dea_l3.png "Rendered by QuickLaTeX.com")
Exemple E-3
Nous avons vu plus haut la formule de Grassmann, qui donne la dimension d’une somme de deux sev de dimensions finies. Voici une nouvelle preuve de ce résultat.
Notons un espace vectoriel et deux sous espaces de dimensions finies.
Considérons l’application
![\[\varphi:F\times G\rightarrow E,\thinspace\left(x,y\right)\mapsto x+y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d260e63b2101a0d815f86b9ba8ba0500_l3.png "Rendered by QuickLaTeX.com")
est linéaire et que  (simple affaire de définition).
(simple affaire de définition).
Le noyau de est :

 un isomorphisme naturel étant :
un isomorphisme naturel étant : ![\[\theta:F\cap G\rightarrow\ker\left(\varphi\right),\thinspace x\mapsto\left(x,-x\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5c6054f4a28c9e687916bdd57446ae51_l3.png "Rendered by QuickLaTeX.com")
![\[\dim\left(\ker\left(\varphi\right)\right)=\dim\left(F\cap G\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-272d1e580bb191747c77260fa69e9c6f_l3.png "Rendered by QuickLaTeX.com")
La formule du rang montre alors que :
![\[\dim\left(F\times G\right)=\dim\left(\ker\left(\varphi\right)\right)+\dim\left(\text{Im}\left(\varphi\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-40e99a3a6568529510b6567298e4cb2b_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\dim\left(F\right)+\dim\left(G\right)=\dim\left(F\cap G\right)+\dim\left(F+G\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-337f6fd28967d2fcaf7e157137fda519_l3.png "Rendered by QuickLaTeX.com")
7 – Dimension des espaces d’applications linéaires
Très utile aussi, une formule donnant la dimension de l’espace des applications linéaires de vers où sont deux espaces vectoriels de dimensions finies.
En fait, nous avons déjà établi — quoiqu’indirectement — cette formule, puisque nous avons vu que 
Or, si l’on note 
 , une base de et
, une base de et  une base de alors l’application
une base de alors l’application
![\[\mathcal{L}\left(E,F\right)\rightarrow\mathcal{M}_{n,p}\left(\mathbb{K}\right),\thinspace u\mapsto Mat_{\beta,\gamma}\left(u\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-072704ece89bb3510c5277480738974c_l3.png "Rendered by QuickLaTeX.com")

Autrement dit :
( )
) ![\[\boxed{\dim\left(\mathcal{L}\left(E,F\right)\right)=\dim\left(E\right)\thinspace\dim\left(F\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-afd9f948c3f96348c34a52ebc802a469_l3.png "Rendered by QuickLaTeX.com")
On peut établir directement la formule  en exploitant le fait qu’une application linéaire est déterminée par les images des vecteurs d’une base. Ce principe (qui conduit à la notion de matrice d’une application linéaire relativement à un couple de bases) est étudié en détail dans cet article.
en exploitant le fait qu’une application linéaire est déterminée par les images des vecteurs d’une base. Ce principe (qui conduit à la notion de matrice d’une application linéaire relativement à un couple de bases) est étudié en détail dans cet article.
Fixons donc une base de et considérons l’application
![\[\Psi:\mathcal{L}\left(E,F\right)\rightarrow F^{p},\thinspace u\mapsto\left(u\left(e_{1}\right),\cdots,u\left(e_{p}\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2bb868cb44bc49730d07814a4e3b335c_l3.png "Rendered by QuickLaTeX.com")
 uplet
uplet  de vecteurs de il existe une application linéaire
de vecteurs de il existe une application linéaire  et une seule telle que :
et une seule telle que :
![\[\forall j\in\left\llbracket 1,p\right\rrbracket ,\thinspace u\left(e_{j}\right)=f_{j}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f6844dfd1f0e8c2833eb7a88702a35ab_l3.png "Rendered by QuickLaTeX.com")
uplet de vecteurs de possède un unique antécédent par 
En outre  est linéaire (vérification aisée, non détaillée). Il s’agit donc d’un isomorphisme.
est linéaire (vérification aisée, non détaillée). Il s’agit donc d’un isomorphisme.
A nouveau, la règle C s’applique et permet de conclure que :
![\[\dim\left(\mathcal{L}\left(E,F\right)\right)=\dim\left(F^{\dim\left(E\right)}\right)=\dim\left(E\right)\dim\left(F\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5612f1ffc23bc3d73ad88d62494d2a78_l3.png "Rendered by QuickLaTeX.com")
Remarque
Un cas particulier important est celui du dual d’un espace vectoriel
Il s’agit de l’espace  des formes linéaires sur souvent noté
des formes linéaires sur souvent noté  D’après ce qui précède, et vu que
D’après ce qui précède, et vu que  on voit que :
on voit que :
![\[\boxed{\dim\left(E^{\star}\right)=\dim\left(E\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-40b4f1aab4871e5c6f7f9c7afad28743_l3.png "Rendered by QuickLaTeX.com")
8 – Et lorsque la dimension est infinie ?
La question soulevée dans cette section est la suivante :
Comment prouver qu’un espace vectoriel donné est de dimension infinie ?
Lorsqu’un espace vectoriel est de dimension finie toute famille libre est finie et comporte au plus vecteurs (ceci découle du lemme de Steinitz, qui est expliqué en détail dans cette vidéo).
Par conséquent :
Règle F
Pour établir qu’un espace est de dimension infinie, il suffit de prouver l’existence de familles libres de cardinal arbitraire.
Règle F-Bis
Pour établir qu’un espace est de dimension infinie, il suffit d’exhiber un sous-espace de dimension infinie.
Plus généralement : soient et des espaces vectoriels, étant de dimension infinie. S’il existe une application linéaire injective de dans alors est de dimension infinie.
Voyons quelques exemples d’utilisation de ces règles …
Exemple F-1
Pour tout entier  la famille de polynômes
la famille de polynômes  est libre dans l’espace
est libre dans l’espace ![\mathbb{K}\left[X\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-df93be377a36375414a904d2b1b50708_l3.png "Rendered by QuickLaTeX.com") et comporte
et comporte  vecteurs. Comme peut être choisie de façon arbitraire, ceci montre que est de dimension infinie.
vecteurs. Comme peut être choisie de façon arbitraire, ceci montre que est de dimension infinie.
Exemple F-2
Dans cette vidéo, on prouve que, pour tout  la famille constituée des applications :
la famille constituée des applications :
![\[f_{k}:\left[0,2\pi\right]\rightarrow\mathbb{R},\thinspace x\mapsto\cos\left(kx\right)\qquad\left(0\leqslant k\leqslant n\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-d55f3b941e21bbbf85bc4e263d803697_l3.png "Rendered by QuickLaTeX.com")
![\left[0,2\pi\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-14eb44bf777d0fdb45ff4110e7e90713_l3.png "Rendered by QuickLaTeX.com") dans
dans 
Cet espace est donc de dimension infinie.
Bien entendu, le choix de l’intervalle ne joue aucun rôle particulier et la continuité peut être remplacée par une condition plus forte (voir exemple suivant).
Exemple F-3
Pour tout intervalle  de longueur non nulle, l’espace des applications polynomiales de
de longueur non nulle, l’espace des applications polynomiales de  dans
dans  est de dimension infinie. Il en résulte que l’espace
est de dimension infinie. Il en résulte que l’espace  des applications indéfiniment dérivables de dans (qui contient le précédent) est de dimension infinie.
des applications indéfiniment dérivables de dans (qui contient le précédent) est de dimension infinie.
Même chose pour l’espace des applications de classe  (pour tout entier
(pour tout entier  de dans
de dans
Même chose pour l’espace  de toutes les applications de dans
de toutes les applications de dans
On a donc une chaîne d’espaces emboîtés, tous de dimension infinie :
![\[P\left(I,\mathbb{R}\right)\subset C^{\infty}\left(I,\mathbb{R}\right)\subset\cdots\subset C^{p}\left(I,\mathbb{R}\right)\subset\cdots\subset C^{0}\left(I,\mathbb{R}\right)\subset\mathbb{R}^{I}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5d178818277a964501b9032429ae5a89_l3.png "Rendered by QuickLaTeX.com")
Exemple F-4
Soient deux réels 
Notons  l’espace vectoriels des applications en escalier de
l’espace vectoriels des applications en escalier de ![\left[a,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c1c9b62f4ffe493505d6566104a9b311_l3.png "Rendered by QuickLaTeX.com") dans
dans
Rappelons qu’une application ![f:\left[a,b\right]\rightarrow\mathbb{R}](https://math-os.com/wp-content/ql-cache/quicklatex.com-d4da71c7eb5c9e6aa61c58d77d717be2_l3.png "Rendered by QuickLaTeX.com") est dite en escalier lorsqu’il existe une subdivision
est dite en escalier lorsqu’il existe une subdivision  telle que la restriction de à chacun des intervalles
telle que la restriction de à chacun des intervalles ![\left]x_{i-1},x_{i}\right[](https://math-os.com/wp-content/ql-cache/quicklatex.com-68d0abca35830028203628ed355b3136_l3.png "Rendered by QuickLaTeX.com") (pour
(pour  soit constante.
soit constante.
Si l’on pose, pour tout ![\alpha\in\left[a,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-4f1b9b0617758e21d4a54c8ee93a186b_l3.png "Rendered by QuickLaTeX.com") :
:
![\[\delta_{\alpha}:\left[a,b\right]\rightarrow\mathbb{R},\thinspace t\mapsto\left\{ \begin{array}{cc}1 & \text{si }t=\alpha\\0 & \text{sinon}\end{array}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c7386384ee16a74e4768657a8f54c38a_l3.png "Rendered by QuickLaTeX.com")
 .
.
De plus, si ![\alpha_{1},\cdots,\alpha_{n}\in\left[a,b\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-626cd875a316c403b5de68d9bd27f028_l3.png "Rendered by QuickLaTeX.com") sont tous distincts, la famille
sont tous distincts, la famille  est libre.
est libre.
Il s’ensuit que est de dimension infinie.
On peut en déduire que l’espace des applications de dans qui ne prennent qu’un nombre fini de valeurs est aussi de dimension infinie, puisqu’il contient 
Vos questions ou remarques sont les bienvenues. Vous pouvez laisser un commentaire ci-dessous ou bien passer par le formulaire de contact.