Solutions détaillées de neuf exercices sur la notion de dimension en algèbre linéaire (fiche 01).
Cliquer ici pour accéder aux énoncés.
Divers éléments théoriques sont disponibles dans cet article.

Selon la formule de Grassmann :
![\[\dim\left(F\cap G\right)=\dim\left(F\right)+\dim\left(G\right)-\dim\left(F+G\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-35f6811378b88749074fc67f161eda6f_l3.png "Rendered by QuickLaTeX.com")

 et
et 
Il s’ensuit que :
![\[\dim\left(F\cap G\right)\geqslant a+b-\left(a+b-1\right)=1\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6e2501824adff21520a28b123248f483_l3.png "Rendered by QuickLaTeX.com")
 (ou, ce qui revient au même, d’une droite vectorielle incluse dans
(ou, ce qui revient au même, d’une droite vectorielle incluse dans 
Si  est une homothétie, il est évident que
est une homothétie, il est évident que  et donc (vu que
et donc (vu que  :
:
![\[\boxed{\dim\left(C_{f}\right)=4}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-97febe741d252739c19d8cb077ff574b_l3.png "Rendered by QuickLaTeX.com")
n’est pas une homothétie.
D’après la caractérisation des homothéties, il existe un vecteur  tel que
tel que  soit libre. Cette famille est donc une base de
soit libre. Cette famille est donc une base de 
Considérons l’application :
![\[\boxed{\varphi:C_{f}\rightarrow E,\thinspace g\mapsto g\left(e\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-837bffe99a4e2b833b5f843a104b9da7_l3.png "Rendered by QuickLaTeX.com")
➢➢ La linéarité de  est évidente.
est évidente.
➢➢ Injectivité de :
Si  alors
alors  donc
donc  Ceci entraîne que
Ceci entraîne que  est l’endomorphisme nul (une application linéaire qui s’annule sur une base est l’application nulle).
est l’endomorphisme nul (une application linéaire qui s’annule sur une base est l’application nulle).
➢➢ Surjectivité de :
Soit  Décomposons
Décomposons  dans la base
dans la base  sous la forme :
sous la forme :
![\[x=\lambda\thinspace e+\mu\thinspace f\left(e\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-5a461bed57bb7c3a08c89ed9a43aeb85_l3.png "Rendered by QuickLaTeX.com")
![\[x=\left(\lambda\thinspace id_{E}+\mu\thinspace f\right)\left(e\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-a8b6541e03c2e8493c6ecb13e7161aa2_l3.png "Rendered by QuickLaTeX.com")
 ceci prouve que
ceci prouve que 
En définitive, est un isomorphisme. Il en résulte que :
![\[\boxed{\dim\left(C_{f}\right)=2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-900d25a6f2569c5bdcf53c5d1fe747f3_l3.png "Rendered by QuickLaTeX.com")
Considérons la base canonique  de
de  et translatons-la de
et translatons-la de  .
.
Ceci signifie simplement qu’on ajoute la matrice unité à chaque matrice élémentaire pour fabriquer une nouvelle famille de  matrices.
matrices.
Prouvons que la famille  est une base de
est une base de 
Notons  si
si  alors :
alors :

![\[\mu=\sum_{1\leqslant p,q\leqslant n}m_{p,q}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-9c24286db70f8c6cde8ffb4fcea99286_l3.png "Rendered by QuickLaTeX.com")
![\[\sum_{p=1}^{n}F_{p,p}=\left(n+1\right)I_{n}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-27f6b1eeb8c29e83cd086ab8c093c646_l3.png "Rendered by QuickLaTeX.com")
![\[M=\left(\sum_{1\leqslant p,q\leqslant n}m_{p,q}F_{p,q}\right)-\frac{\mu}{n+1}\sum_{p=1}^{n}F_{p,p}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-74702e08a180fede93c52ead79244853_l3.png "Rendered by QuickLaTeX.com")
 est génératrice de
est génératrice de
Comme cette famille comporte matrices, c’est bien une base de
Enfin, on constate que les  sont toutes inversibles, puisque ce sont des matrices triangulaires (voire diagonales pour certaines d’entre-elles) dont les termes diagonaux sont tous nuls.
sont toutes inversibles, puisque ce sont des matrices triangulaires (voire diagonales pour certaines d’entre-elles) dont les termes diagonaux sont tous nuls.
Considérons l’application  définie par :
définie par :

est linéaire.
Si  alors
alors  pour tout
pour tout  Et comme la restriction de à
Et comme la restriction de à ![\left[\frac{k}{n},\frac{k+1}{n}\right]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2df038cfe2c60e5cc0a4b43c5169f170_l3.png "Rendered by QuickLaTeX.com") est affine, elle est nulle et donc
est affine, elle est nulle et donc  Ainsi est injective.
Ainsi est injective.
Etant donné  considérons l’application
considérons l’application  définie par :
définie par :
![\[\boxed{\forall x\in\left[0,1\right],\:f_{j}\left(x\right)=\left\{ \begin{array}{ccc}nx-j+1 & \textrm{si} & x\in\left[\frac{j-1}{n},\frac{j}{n}\right]\\\\-nx+j+1 & \textrm{si} & x\in\left[\frac{j}{n},\frac{j+1}{n}\right]\\\\0 & \textrm{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0714db450198ee825030be524fdb99e2_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{f_{0}\left(x\right)=\left\{ \begin{array}{ccc}-nx+1 & \textrm{si} & x\in\left[0,\frac{1}{n}\right]\\0 & \textrm{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-39dc0970c577d502cd5738b9cdd20e5d_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{f_{n}\left(x\right)=\left\{ \begin{array}{ccc}nx-n+1 & \textrm{si} & \textrm{x}\in\left[\frac{n-1}{n},1\right]\\0 & \textrm{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-86842b561c31a434822d0839ea7f5af3_l3.png "Rendered by QuickLaTeX.com")
 et que
et que 
Soit alors  l’application
l’application
![\[f=\sum_{j=0}^{n}\,b_{j}\,f_{j}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-6b37b74930020d24fcbf81a24fa9bd85_l3.png "Rendered by QuickLaTeX.com")
 et vérifie :
et vérifie : ![\[\forall k\in\left\llbracket 0,n\right\rrbracket ,\,f\left(\frac{k}{n}\right)=b_{k}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-20035034d15a1469af8f24bb104f46ee_l3.png "Rendered by QuickLaTeX.com")
 Finalement, est un isomorphisme et donc :
Finalement, est un isomorphisme et donc : ![\[\boxed{\dim\left(E_{n}\right)=n+1}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b2b29827289e22839fe3cb953f65ed71_l3.png "Rendered by QuickLaTeX.com")
Notons  une primitive de
une primitive de  (on rappelle que toute application continue d’un intervalle
(on rappelle que toute application continue d’un intervalle  dans
dans  admet des primitives). Soit
admet des primitives). Soit  dérivable et soit :
dérivable et soit :
![\[F:I\rightarrow\mathbb{R},\thinspace x\mapsto f\left(x\right)\thinspace e^{-A\left(x\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-610799105474156cb402643548d9da01_l3.png "Rendered by QuickLaTeX.com")
 est dérivable et :
est dérivable et : ![\[\forall x\in I,\thinspace F'\left(x\right)=\left(f'\left(x\right)-u\left(x\right)\thinspace f\left(x\right)\right)\thinspace e^{-A\left(x\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f9a39c766d3ac1d537c36415f7496ac2_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{f\in E\Leftrightarrow F\text{ est constante}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2775354d158b48393e4ddb0160cde7dd_l3.png "Rendered by QuickLaTeX.com")
 est la droite vectorielle engendrée par
est la droite vectorielle engendrée par  et, en particulier :
et, en particulier : 
Remarque
Ce qui précède est fondamental :
Si  est continue, l’espace des solutions sur
est continue, l’espace des solutions sur  de l’équation différentielle
de l’équation différentielle
![\[\boxed{y'=u\left(x\right)\thinspace y}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8850ab94ef2eed5cd2ff90a32ceb6b81_l3.png "Rendered by QuickLaTeX.com")
Considérons maintenant l’équation différentielle :
![\[x\left(x-1\right)\thinspace y'=2\left(2x-1\right)\thinspace y\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-79fabdfe79e5ad03edff9fd4a177d490_l3.png "Rendered by QuickLaTeX.com")
 on cherche d’abord ses solutions l’un des trois intervalles suivants :
on cherche d’abord ses solutions l’un des trois intervalles suivants :
![\[I_{0}=\left]-\infty,0\right[,\quad I_{1}=\left]0,1\right[,\quad I_{2}=\left]1,+\infty\right[\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-77f12db664b8bc1139442271f0fac7f4_l3.png "Rendered by QuickLaTeX.com")
 ne s’annule pas.
ne s’annule pas.
Ceci permet de se ramener à l’équation différentielle  avec :
avec :
![\[u\left(x\right)=\frac{2\left(2x-1\right)}{x\left(x-1\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-79c1d22ca850decdf826ff57668a71a7_l3.png "Rendered by QuickLaTeX.com")
 alors une primitive sur
alors une primitive sur  de est donnée par :
de est donnée par : ![\[x\mapsto2\ln\left|x^{2}-x\right|\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-98b03c0003af9ae51965af8f6ea90865_l3.png "Rendered by QuickLaTeX.com")
sont donc les : ![\[x\mapsto\lambda\thinspace\left(x^{2}-x\right)^{2}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-7a0dae368491ccdf516d704ad4aeb3e2_l3.png "Rendered by QuickLaTeX.com")
est une solution sur alors il existe  tel que soit définie par :
tel que soit définie par :
![\[\boxed{x\mapsto\left\{\begin{array}{cc}\lambda_{0}\left(x^{2}-x\right)^{2} & \text{si }x\leqslant0\\\lambda_{1}\left(x^{2}-x\right)^{2} & \text{si }0<x\leqslant1\\\lambda_{2}\left(x^{2}-x\right)^{2} & \text{si }x>1\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-744320554c6203d9bf63d32faf77dad1_l3.png "Rendered by QuickLaTeX.com")
Réciproquement, l’application ainsi définie est dérivable quel que soit et c’est donc une solution sur 
En conclusion :
![\[\boxed{\dim\left(F\right)=3}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-1c3c182133c105cfacb111d2c07cd004_l3.png "Rendered by QuickLaTeX.com")
est  avec :
avec :
![\[\boxed{\varphi_{0}:\mathbb{R}\rightarrow\mathbb{R},\thinspace x\mapsto\left\{ \begin{array}{cc}\left(x^{2}-x\right)^{2} & \text{si }x<0\\0 & \text{sinon} \end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-0963a88fc4fa9670a203f6df53df987d_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\varphi_{1}:\mathbb{R}\rightarrow\mathbb{R},\thinspace x\mapsto\left\{ \begin{array}{cc} \left(x^{2}-x\right)^{2} & \text{si }0<x<1\\0 & \text{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-40983395a963ac5fa6d3cab31b9190b5_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\varphi_{2}:\mathbb{R}\rightarrow\mathbb{R},\thinspace x\mapsto\left\{ \begin{array}{cc} \left(x^{2}-x\right)^{2} & \text{si }x>1\\0 & \text{sinon}\end{array}\right.}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-3e4786bd9ae12c80f8d135aea5f5569b_l3.png "Rendered by QuickLaTeX.com")
Illustration dynamique
L’illustration dynamique ci-dessous permet de visualiser les solutions.
Les trois sliders contrôlent respectivement les coefficients 
 et
et 
En positionnant deux de ces trois coefficients à 0, on peut voir le graphe d’une solution proportionnelle à l’une des 
Translater le système de coordonnées en pressant SHIFT →↑↓←.
Zoomer / dézoomer en utilisant les touches P / M.
Notons  la restriction de à
la restriction de à  Son noyau et son image sont respectivement :
Son noyau et son image sont respectivement :
![\[\ker\left(\tilde{f}\right)=\ker\left(f\right)\cap\mbox{Im}\left(g\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-40e03f10891164c3531ea043a6710b0b_l3.png "Rendered by QuickLaTeX.com")
![\[\mbox{Im}\left(\tilde{f}\right)=\mbox{Im}\left(f\circ g\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-8afb7fc2c7bfb12071986042b1a597c4_l3.png "Rendered by QuickLaTeX.com")
Le théorème du rang appliqué à donne :
( )
) ![\[\mbox{rg}\left(g\right)=\dim\left(\ker\left(f\right)\cap\mbox{Im}\left(g\right)\right)+\mbox{rg}\left(f\circ g\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-efba89cfda5700487074ed9ddedd5b16_l3.png "Rendered by QuickLaTeX.com")
![\[\left\{ \begin{array}{ccc}\mbox{rg}\left(g\right) & = & n-\dim\left(\ker\left(g\right)\right)\\\\\mbox{rg}\left(f\circ g\right) & = & n-\dim\left(\ker\left(f\circ g\right)\right)\end{array}\right.\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-b01c8de5cee4907754f44ec2f7a7844b_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[\dim\left(\ker\left(f\circ g\right)\right)=\dim\left(\ker\left(f\right)\cap\mbox{Im}\left(g\right)\right)+\dim\left(\ker\left(g\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f0178e2932ae0aaa77df8cae76f6d70d_l3.png "Rendered by QuickLaTeX.com")
 on voit que :
on voit que :
( )
) ![\[\boxed{\dim\left(\ker\left(f\circ g\right)\right)\leqslant\dim\left(\ker\left(f\right)\right)+\dim\left(\ker\left(g\right)\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-edb140ac9a884e2ae6b323672b4c01dc_l3.png "Rendered by QuickLaTeX.com")
L’égalité dans  se produit lorsque l’inclusion
se produit lorsque l’inclusion  est une égalité, c’est-à-dire lorsque
est une égalité, c’est-à-dire lorsque 
Passons à la seconde inégalité.
L’inclusion évidente  donne, en passant aux dimensions :
donne, en passant aux dimensions :
![\[\dim\left(\ker\left(g\right)\right)\leqslant\dim\left(\ker\left(f\circ g\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-63ac461d2035322d0f11c6f0d6d67e5d_l3.png "Rendered by QuickLaTeX.com")
 donne
donne  et donc, via la formule du rang :
et donc, via la formule du rang : ![\[\dim\left(\ker\left(f\right)\right)\leqslant\dim\left(\ker\left(f\circ g\right)\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-f2a0ef16ecbd237e5ebe3796a2697a43_l3.png "Rendered by QuickLaTeX.com")
( )
) ![\[\boxed{\max\left\{ \dim\left(\ker\left(f\right)\right),\thinspace\dim\left(\ker\left(g\right)\right)\right\} \leqslant\dim\left(\ker\left(f\circ g\right)\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-26c2292d60bf94ccce3f5217a2c6cf15_l3.png "Rendered by QuickLaTeX.com")
 se produit lorsque
se produit lorsque  ou
ou 
On peut compléter la famille libre  en une base
en une base
![\[B=\left(v_{1},\cdots,v_{r},v_{r+1},\cdots,v_{n}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2f36a5663c416b0c31d7c775482eff07_l3.png "Rendered by QuickLaTeX.com")
Notons : ![\[B^{\star}=\left(v_{1}^{\star},\cdots,v_{r}^{\star},v_{r+1}^{\star},\cdots,v_{n}^{\star}\right)\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bf40cd944ad6aad92650ce94e1426766_l3.png "Rendered by QuickLaTeX.com")

 désigne la forme linéaire définie par :
désigne la forme linéaire définie par :
![\[\boxed{\forall j\in\left\llbracket 1,n\right\rrbracket ,\thinspace v_{i}^{\star}\left(v_{j}\right)=\delta_{i,j}}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-77b0704ff2ca2c35fa17577a6c7c2237_l3.png "Rendered by QuickLaTeX.com")
 est une base de l’espace
est une base de l’espace  des formes linéaires sur
des formes linéaires sur
L’expression de toute forme linéaire dans la base est :
![\[\varphi=\sum_{i=1}^{n}\varphi\left(v_{i}\right)\thinspace v_{i}^{\star}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-59d8519b74960c757803321c984b07c1_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[F_{i}=\left\{ \varphi\in\mathcal{L}\left(E,\mathbb{K}\right);\thinspace\varphi\left(v_{i}\right)=0\right\}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-2a2cc4bf3b8954944288767752e3fa7c_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\bigcap_{i=1}^{r}F_{i}=\text{vect}\left(v_{r+1}^{\star},\cdots,v_{n}^{\star}\right)}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-dcb3ab1a1265bb863f69e6055fa48c39_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{\dim\left(\bigcap_{i=1}^{r}F_{i}\right)=n-r}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-c8b29cfffd25037c312e4a71056b149c_l3.png "Rendered by QuickLaTeX.com")
Il semble que le plus clair consiste à raisonner matriciellement. Notons :


 une base de
une base de  complétée en une base
complétée en une base  de
de 
 une base de
une base de  complétée en une base
complétée en une base  de
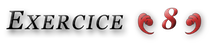
de  le sous-espace vectoriel de constitué des matrices dont les termes situés en ligne
le sous-espace vectoriel de constitué des matrices dont les termes situés en ligne  et colonne
et colonne  avec
avec  ou
ou  sont tous nuls.
sont tous nuls.
Dans l’illustration ci-dessous, tous les termes de la zone grisée sont nuls, les autres (zone bleutée) sont arbitraires :
En associant à tout  sa matrice relativement aux bases
sa matrice relativement aux bases  et
et  , on définit une application linéaire de
, on définit une application linéaire de  vers
vers  Cette application est bijective car une application linéaire est entièrement déterminée par la donnée des images des vecteurs d’une base. En outre, si désigne la base canonique de
Cette application est bijective car une application linéaire est entièrement déterminée par la donnée des images des vecteurs d’une base. En outre, si désigne la base canonique de  alors la sous famille
alors la sous famille  est une base de
est une base de  et donc
et donc  En conclusion :
En conclusion :
![\[\boxed{\dim\left(V\right)=\left(n-a\right)b}\]](https://math-os.com/wp-content/ql-cache/quicklatex.com-bdb2993b823fce8ae49da857739c81f7_l3.png "Rendered by QuickLaTeX.com")
Bientôt 🙂
Si un point n’est pas clair ou vous paraît insuffisamment détaillé, n’hésitez pas à poster un commentaire ou à me joindre via le formulaire de contact.